Download
1 / 41
420 likes | 625 Views
Shallow Water Wide-Swath Hydrography with AUVs Shallow Survey Conference 2008 Matt Geen Systems Engineering & Assessment Ltd. Points. AUVs for very shallow water bathymetric survey? Other, semi-autonomous platforms Surveying three-dimensional structures

E N D
Shallow Water Wide-Swath Hydrography with AUVs Shallow Survey Conference 2008 Matt Geen Systems Engineering & Assessment Ltd.
Points • AUVs for very shallow water bathymetric survey? • Other, semi-autonomous platforms • Surveying three-dimensional structures • Interferometric system accuracy and resolution
Shallow Survey with AUVs • Autonomous Underwater Vehicles (AUVs) have been used for seabed mapping for over twelve years • Largely confined to applications where no other technology could operate effectively • Deep water • Dangerous environments NOCS Autosub6000 • Becoming and cost-effective for seabed mapping practical in shallow water (less than 200 metres) • .. And even in very shallow water, less than 20m
Very Shallow Survey • SEA and Hydroid have been trialling AUV bathymetric survey in very shallow water; 5m to 20m • SEA have developed a version of the SWATHplus interferometric swath bathymetry system for use with AUVs and remote platforms, including Hydroid Inc’s REMUS 100
REMUS 100 • Compact, light-weight • Designed for operation in coastal environments down to 100m • 19cm diameter • With SWATHplus RS100 fitted: • weighs 49kg, • 2.0m long
SWATHplus RS100 • Wide-swath, high-resolution interferometric swath bathymetry system • 468kHz sonar frequency • 404mm long, weighs 12kg • Neutrally buoyant in water • Power consumption: • 25W when active, • 7W when quiescent, e.g. during transit to survey area
AUVs in Shallow Water Bathymetry: Advantages • Rapid survey preparation and setting to work: AUV is a self-contained unit • Can reach places where surface vessels cannot go: e.g. close to platforms and underwater structures • Surface vessel can continue its survey work whilst AUV is operating: increased cost-effectiveness • Can optimise altitude and stand-off • Can track pipelines and similar features • Fine track control and short turns • More stable than surface ships in poor weather
AUVs in Shallow Water Bathymetry: Issues • Launch and recovery can be challenging and potentially risky • Issues with safety regulations • Stability affected by wave action in very shallow water • Risk from surface shipping • Surface vessel needs to stay close: • Recover if weather gets worse • Risk from fishing vessels
Interferometry and AUVs • Electronics and transducers are small and light • Low power consumption • RS100 consumes less than half the power of similar systems • REMUS on its own consumes around 50W • RS100 uses 25W when active • Improved mission length • Wide swath width compared to the vehicle’s altitude
Trials • SEA and Hydroid were invited by NAM, a division of Shell, to perform sea-trials with REMUS 100 and SWATHplus RS100, off Ameland, the Netherlands, in June 2008 • Survey area between 5 and 15 metres deep • Strong on-shore winds in shallow water: • Rough sea conditions, with short choppy waves • Limited by weather to one and half days at sea
Deployment • AUV deployed from MV Lia, operated by Osiris Projects Ltd. • Dive platform at the rear used for launch and recovery, by hand • Plenty of aft deck space for storing the vehicle during transits to site
3D Video 3D Platform Scan • yyy
Results • Survey operation was smooth and efficient • Automatic survey operation worked well • Each survey line conveniently labelled and stored on disk ready for uploading and processing • Missions run (in 1.5 days at-sea time): • Patch Test calibration: 15 minutes’ vehicle run-time • Five kilometre pipeline route survey, one hour run-time • Four-hour continuous mission: • Two gas platforms • Five-kilometre pipe route • 1200 × 400 metre “lawnmower” site survey.
Issues: Stability in Rough Sea • Motion strongly affected by surface waves
Issues: Heave Artefact 1 • Along-track heave artefact • About 0.2m amplitude • Probably due to wave action on the pressure sensor
Issues: Heave Artefact 2 • Using post-processed heave data file • Includes INS data?
Issues: Height Measurement • Depth “bust” between lines • Where vehicle has surfaced for position and depth update
Issues: Multipathing • Sonar data quality drop-off at some vehicle depths • Reflections from surface?
Issues: Multipathing • Sonar data quality drop-off at some vehicle depths • Reflections from surface?
Areas for Improvement • Improved vehicle stability in very shallow water when it has extra mass on nose • Improve accuracy of vehicle depth measurement • Launch and recovery procedures and equipment for the off-shore environment • Optimising sonar configuration, • e.g. to minimise multi-pathing
Other, Semi-Autonomous Platforms • Swath system designed for fully autonomous platforms has other applications: • Very simple user interface • Low bandwidth communication to controller • Small, compact, low-power, waterproof complete swath solution
Other Platforms: JetSWATH • Uses the same “engine” as RS100 • Complete attitude and GPS package • Simple touch-screen waterproof operator screen • Simple track-following display and on-off buttons • Ideal for near-shore or inland, very shallow water, or where access is difficult • Simple transit with a trailer
Other Platforms: JetSWATH • Sonar in water-tight box
Other Platforms: Autosurvey • Small un-manned surface platform • Also uses the RS100 “engine” • Radio control from the bank • Ideal for areas with difficult access for manned vessels, e.g. small rivers and remote lakes • Can be carried in a delivery van or small truck
Scanning 3D structures • In September 2008, SEA invited by Fugro Chance, of Lafayette, LA, USA to help to survey sunken oil platforms, damaged by hurricane Ike. • Used the SWATHplus-M system (234kHz), from a side-mounted pole • Six platforms surveyed in four days • Location and configuration of all damaged rigs was identified
Images Intensity-coloured 3D views Depth-coloured 2D views Sidescan images
Lessons Learned To improve resolution: • Minimise acoustic noise • The pole was close to the propellers • Get closer to the structures • Dangerous: remains of the structures close to the surface • Needs very careful planning and accurate line running • Reduce ground speed • Reduces manoeuvrability • Need highly accurate positioning, attitude and timing calibration • Use two sonars together: • Low-frequency: detect debris at safe stand-off • High frequency: close-in, high-resolution work
SWATHplus Accuracy and Resolution: Measurement and Modelling • Interferometric swath bathymetry systems give many data points per side (2000 to 8000) • Uncertainty of raw data points usually greater than that of beam-forming multibeams (100 – 200 points per side) • Software filtering reduces uncertainty to internationally acceptable survey limits • At the expense of survey resolution • Accuracy (uncertainty) is defined by IHO S44 • Defines total propagated uncertainty (TPU), • Resolution (detection of small objects) • Data coverage (accepted points per metre)
SWATHplus Error Analysis • From work of Dr Peter Dobbins of SEA, to demonstrate that interferometers can satisfy IHO S44 • Data from SWATHplus “Shallow Survey 08” data set analysed: • random component of horizontal and vertical uncertainties in processed SWATHplus output. • Raw data smoothed with a sliding Gaussian window: • scale size selected to maintain IHO S44 resolution (samples per metre)
SWATHplus Error Analysis • Calculated Standard deviations of overall vertical and height variations • 95% confidence level uncertainties (as defined by S44) as a function of range (using a second sliding window) • Error model developed for SWATHplus, based on Sonar Equation analysis • Uncertainties measured from raw data compared with error model • Maximum range at which IHO accuracy is achieved calculated
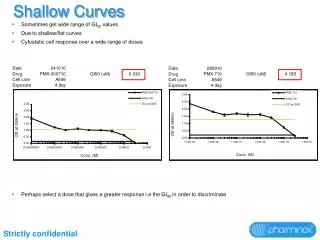
Typical “Ping”: 234kHz • Depth vs horizontal range • Raw data: blue • Mean: red
95% Uncertainty, 234kHz • Data smoothed at a level to maintain IHO points-per-m2 criterion
95% Uncertainty Averaged over Many “Pings” and Compared with Model, 234kHz
Range vs Depth for IHO S44 Special Order • Computed from validated model • Marked points derived from real data
Acknowledgements Many thanks to: • NAM and Shell • Hydroid Inc • Osiris Projects • Fugro Chance Inc. & John Chance Land Survey Inc.