Download
1 / 1
10 likes | 115 Views
Perceiving in Terms of Planning: Intentional Dynamics Reverse the Influence of Implied Friction of Spatial Perception. Personal thank you to Prince Anchan Mike Nehlsen Kevin Logan. Authors Devin M. Gill J. Scott Jordan. Contact dmgill@ilstu.edu jsjorda@ilstu.edu.

E N D
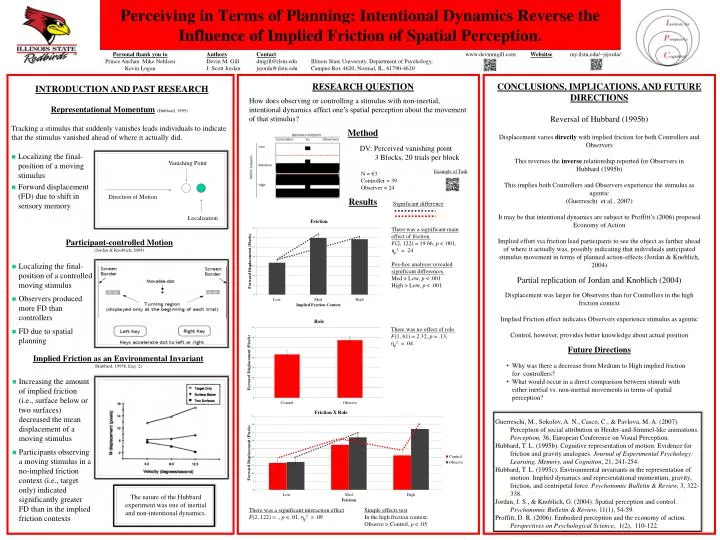
Perceiving in Terms of Planning: Intentional Dynamics Reverse the Influence of Implied Friction of Spatial Perception. Personal thank you to Prince Anchan Mike Nehlsen Kevin Logan Authors Devin M. Gill J. Scott Jordan Contact dmgill@ilstu.edu jsjorda@ilstu.edu www.devinmgill.com Websitsemy.ilstu,edu/~jsjorda/ Illinois State University, Department of Psychology, Campus Box 4620, Normal, IL, 61790-4620 RESEARCH QUESTION CONCLUSIONS, IMPLICATIONS, AND FUTURE DIRECTIONS Reversal of Hubbard (1995b) Displacement varies directly with implied friction for both Controllers and Observers This reverses the inverse relationship reported for Observers in Hubbard (1995b) This implies both Controllers and Observers experience the stimulus as agentic (Guerreschi et al., 2007) It may be that intentional dynamics are subject to Proffitt’s(2006) proposed Economy of Action Implied effort via friction lead participants to see the object as farther ahead of where it actually was, possibly indicating that individuals anticipated stimulus movement in terms of planned action-effects (Jordan & Knoblich, 2004) Partial replication of Jordan and Knoblich (2004) Displacement was larger for Observers than for Controllers in the high friction context Implied Friction effect indicates Observers experience stimulus as agentic Control, however, provides better knowledge about actual position INTRODUCTION AND PAST RESEARCH How does observing or controlling a stimulus with non-inertial, intentional dynamics affect one’s spatial perception about the movement of that stimulus? Representational Momentum(Hubbard, 1995) Tracking a stimulus that suddenly vanishes leads individuals to indicate that the stimulus vanished ahead of where it actually did. Method DV: Perceived vanishing point 3 Blocks, 20 trials per block • Localizing the final-position of a moving stimulus • Forward displacement (FD) due to shift in sensory memory Vanishing Point Example of Task N = 63 Controller = 39 Observer = 24 Direction of Motion Results Significant difference Localization There was a significant main effect of friction. F(2, 122) = 19.66, p < .001, ηp2 = .24 Pos-hoc analyses revealed significant differences. Med > Low, p < .001 High > Low, p < .001 Participant-controlled Motion (Jordan & Knoblich, 2004) • Localizing the final-position of a controlled moving stimulus • Observers produced more FD than controllers • FD due to spatial planning There was no effect of role. F(1, 61) = 2.32, p = .13, ηp2 = .04 • Future Directions • Why was there a decrease from Medium to High implied friction for controllers? • What would occur in a direct comparison between stimuli with either inertial vs. non-inertial movements in terms of spatial perception? Implied Friction as an Environmental Invariant (Hubbard, 1995b, Exp. 2) • Increasing the amount of implied friction (i.e., surface below or two surfaces) decreased the mean displacement of a moving stimulus • Participants observing a moving stimulus in a no-implied friction context (i.e., target only) indicated significantly greater FD than in the implied friction contexts Guerreschi, M., Sokolov, A. N., Casco, C., & Pavlova, M. A. (2007). Perception of social attribution in Heider-and-Simmel-like animations. Perception, 36, European Conference on Visual Perception. Hubbard, T. L. (1995b). Cognitive representation of motion: Evidence for friction and gravity analogues. Journal of Experimental Psychology: Learning, Memory, and Cognition, 21, 241-254. Hubbard, T. L. (1995c). Environmental invariants in the representation of motion: Implied dynamics and representational momentum, gravity, friction, and centripetal force. Psychonomic Bulletin & Review, 3, 322-338. Jordan, J. S., & Knoblich, G. (2004). Spatial perception and control. Psychonomic Bulletin & Review, 11(1), 54-59. Proffitt, D. R. (2006). Embodied perception and the economy of action. Perspectives on Psychological Science, 1(2), 110-122. The nature of the Hubbard experiment was one of inertial and non-intentional dynamics. There was a significant interaction effect F(2, 122) = ., p < .01, ηp2 = .09 Simple effects test In the high friction context: Observe > Control, p < .05



![[PDF] Free Download Writers of the Future Volume 34 By L. Ron Hubbard](https://cdn4.slideserve.com/7978353/slide1-dt.jpg)
![[PDF] Free Download Serving Victoria By Kate Hubbard](https://cdn4.slideserve.com/8164170/slide1-dt.jpg)
![[PDF] Free Download MBS By Ben Hubbard](https://cdn5.slideserve.com/9988525/slide1-dt.jpg)