Download
1 / 39
390 likes | 551 Views
Bayesian calibration and comparison of process-based forest models . Marcel van Oijen & Ron Smith (CEH-Edinburgh) Jonathan Rougier (Durham Univ.). Contents. Bayesian calibration of a forest model … what measurements to take? Bayesian comparison of forest models.

E N D
Bayesian calibration and comparison of process-based forest models Marcel van Oijen & Ron Smith (CEH-Edinburgh) Jonathan Rougier (Durham Univ.)
Contents • Bayesian calibration of a forest model • … what measurements to take? • Bayesian comparison of forest models
Process-based forest models Height Environmental scenarios NPP Initial values Soil C Parameters Model
Using data • We need a method that: • 1. Quantifies how uncertainty about inputs and model structure causes output uncertainty • 2. Efficiently uses data, on inputs & outputs, to reduce uncertainties
BASic FORest model (BASFOR) BASFOR 39 parameters 12 output variables
BASFOR: Inputs BASFOR 12 output variables
BASFOR: Prior predictive uncertainty Prior uncertainty for Skogaby Biomass Height
BASFOR: Predictive uncertainty Calibration of parameters Data: measurements of output variables BASFOR 39 parameters High input uncertainty 12 output variables High output uncertainty
Bayes’ Theorem P(|D) = P() P(D| ) / P(D) P() P(D|f()) “Posterior distribution of parameters” “Prior distribution of parameters” “Likelihood” of data, given mismatch with model output f = the model, e.g. BASFOR
Finding the posterior: MCMC P(|D)P() P(D|f()) MCMC: walk through parameter-space →set of visited points approaches the posterior parameter distribution P(|D) [e.g. using Metropolis-Hastings random walk] Sample of 104 -105 parameter vectors from the posterior distribution P(|D) for the parameters
MCMC: Metropolis-Hastings random walk Metropolis (1953) algorithm • Start anywhere in parameter-space: p1..39(i=0) • Randomly choose p(i+1) = p(i) + δ • IF: [ P(p(i+1)) P(D|f(p(i+1))) ] / [ P(p(i)) P(D|f(p(i))) ] > Random[0,1] • THEN: accept p(i+1) • ELSE: reject p(i+1) • i=i+1 • 4. IF i < 104 GOTO 2 Sample of 104 -105 parameter vectors from the posterior distribution P(|D) for the parameters
Forest data from Skogaby (Sweden) Skogaby Planted: 1966, (2300 trees ha-1) Weather data: 1987-1995 Soil data: C, N, Mineralisation rate Tree data: Biomass, NPP, Height, [N], LAI
BASFOR: Prior predictive uncertainty Biomass Height Prior pred. uncertainty Data Skogaby Data: Göran Ågren
MCMC parameter trace plots: 10000 steps Param. value Steps in MCMC
Parameter correlations 39 parameters 39 parameters
Bayesian calibration: overview Data Bayesian calibration
Prior & posterior predictive uncertainty Prior pred. uncertainty Biomass Height Posterior uncertainty (using data Skogaby)
Partial corr. coefficients (PCC) parameters – outputs 12 output variables 39 parameters
2. What kind of measurements would have reduced uncertainty the most?
Prior predictive uncertainty & height-data Prior pred. uncertainty Biomass Height Height data Skogaby
Prior & posterior uncertainty: use of height data Prior pred. uncertainty Biomass Height Height data Skogaby Posterior uncertainty (using height data)
Prior & posterior uncertainty: use of height data Prior pred. uncertainty Biomass Height Height data (hypothet.) Posterior uncertainty (using height data)
Prior & posterior uncertainty: use of height data Prior pred. uncertainty Biomass Height Posterior uncertainty (using height data) Posterior uncertainty (using precision height data)
Summary of procedure “Error function” e.g. N(0, σ) MCMC Samples of f() (104 – 105) Samples of (104 – 105) P(D|f()) PCC Posterior P(|D) Prior P() Model f Data D ± σ Uncertainty of model output Sensitivity analysis of model parameters Calibrated parameters, with covariances
Uncertainty regarding model structure Imperfect understanding Height Environmental scenarios NPP Initial values Soil C Parameters Model
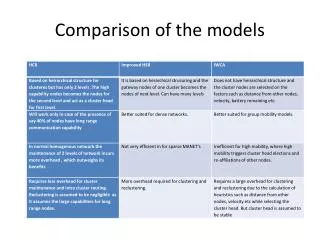
Bayesian comparison of two models Model 1 Model 2 Bayes Theorem for model probab.: P(M|D) = P(M) P(D|M) / P(D) The “Integrated likelihood” P(D|Mi) can be approximated from the MCMC sample of outputs for model Mi (*) P(M1) = P(M2) = ½ P(M2|D) / P(M1|D) =P(D|M2) / P(D|M1) The “Bayes Factor”P(D|M2) / P(D|M1) quantifies how the data D change the odds of M2 over M1 (*) harmonic mean of likelihoods in MCMC-sample (Kass & Raftery, 1995)
Bayes Factor for two big forest models Calculation of P(D|BASFOR) MCMC 5000 steps Data Rajec: Emil Klimo Calculation of P(D|BASFOR+) MCMC 5000 steps
Bayes Factor for two big forest models P(D|M1) = 7.2e-016 Bayes Factor = 7.8, so BASFOR+ supported by the data P(D|M2) = 5.8e-15 Calculation of P(D|BASFOR) MCMC 5000 steps Data Rajec: Emil Klimo Calculation of P(D|BASFOR+) MCMC 5000 steps
Summary of procedure Model 1 Model 2 Prior P(1) Data D Prior P(2) MCMC MCMC Samples of 1 (104 – 105) Samples of 2 (104 – 105) P(D|M1) P(D|M2) Posterior P(2|D) Posterior P(1|D) Bayes factor Updated parameters Updated parameters Updated model odds
Conclusions • Bayesian calibration using MCMC: • Improves model predictive capacity, by updating parameters • Quantifies uncertainty in parameters and output • Forest model calibration: • Benefits from high-precision tree height measurement • Bayesian model comparison: • Same probabilistic approach as Bayesian calibration • Bayes Factor shows how new data change the odds of models • Aid in model development
Bayesian calibration of big models Solutions Sampling problem: Markov Chain Monte Carlo (MCMC) methods Computing problem: increased processor speed P(|D)P() P(D|f()) • Calculating P(|D)costs much time: • Sample parameter-space representatively • For each sampled set of parameter-values: • Calculate P() • Run the model to calculate likelihood P(D|f())
Bayes Factor for two big forest models Calibration MCMC 10000 steps BASFOR 39 params BASFOR + 41 params (Penman eq., corrections) Calibration MCMC 10000 steps
Bayesian methods Bayes’ Theorem MCMC Forest models Crop models Probability theory Bayes, T. (1763) Metropolis, N. (1953) Green, E.J. / MacFarlane, D.W. / Valentine, H.T. , Strawderman, W.E. (1996, 1998, 1999, 2000) Jansen, M. (1997) Jaynes, E.T. (2003)