Download
1 / 21
210 likes | 332 Views
2001 Winter CS215 Course Project Simulation Comparison of Routing Algorithms for Multicast with Bandwidth Reservation Zhihong Duan ( zhihong@cs.ucla.edu ) Mentor: Aiguo Fei( afei@cs.ucla.edu ). Multicast Routing.

E N D
2001 Winter CS215 Course ProjectSimulation Comparison of Routing Algorithms for Multicast with Bandwidth ReservationZhihong Duan (zhihong@cs.ucla.edu)Mentor: Aiguo Fei(afei@cs.ucla.edu)
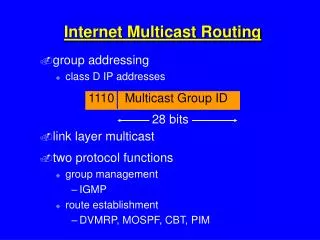
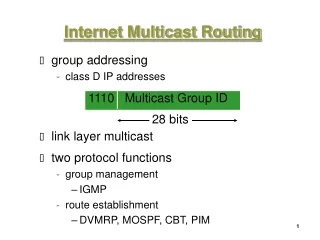
Multicast Routing • Multicast: simultaneous data transmission from a source node to a group of selected nodes • Tree structure is used to share links and minimize resource usage • Group Multicast Routing Problem(GMRP) is a generalization of multicast routing whereby all members of a group can be sources • Problem: find the “best” tree(s) to interconnect all member nodes
Multicast Routing Tree • Finding a least cost tree is NP-complete, greedy strategy is used often instead.( polynomial time) • Considerations in tree construction: • Feasibility: bandwidth requirement • Low Cost (network resource usage) • Load balancing (avoid congestion) • Easy to maintain (administrative overhead) • Two options: Source-based trees and Group-shared tree
A Greedy Procedure:TM • Many routing algorithms are greedy-based • TM Basic procedure: • Input graph(V,E), multicast group D size of m, root iD • Output multicast Tree Ti = (Vi, Ei) • Begin • Vi={i}, Ei= • While (Tihasn’t coverD) • Find PathP(v,u), whereu D-Vi, v Vi, P(v,u) satisfies the pre-set requirement • Vi= Vi {all nodes in P(v,u) except v} • Ei=Ei {all edges in P(v,u)} • End
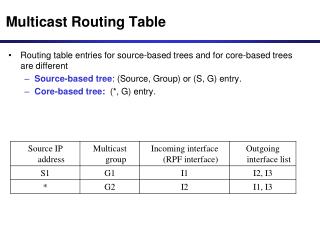
Group TM Algorithm (GTM) • Source-based trees. • TM is used to construct a multicast tree Tn for each source node n. Shortest path has the highest priority to be chosen. • If saturated edges occur in Tn, giving up the saturated edges , • an alternative tree is constructed for n; • for all the previous built trees which use the saturated edges, alternative trees will be built also • The party having the smaller alternative overhead will give up the saturated edge and use the alternative tree(s)
1 1 1 0 3 0 3 34 0 1 1 6 4 1 4 2 4 2 4 2 25 T0 cost =37 T1 cost =37 T2 cost =37 9 20 20 3 0 1 3 2 2 15 4 2 13 5 3 1 3 4 1 1 0 0 0 4 2 4 2 4 2 T’0 cost =47 T’1 cost =47 T’2 cost =79 Overhead=42 Overhead=20
Feasible Solution using adapted TM algorithm for GMRP (FTM) • Source-Based Trees • TM is used to construct a multicast tree Tn for each source node n. Widest path (largest bandwidth capacity) has the highest priority to be chosen • No edge saturation problem. It maximizes success rate, always finds feasible solution if there is any • The trees have higher cost, but they keep better loading balance
Shared-tree TM(STM) • A Single Group-Shared Tree • Using similar greedy approach as TM, selecting the shortest path • Whenever we add a group member into the tree, it doesn’t not only receive data from the tree, but also send out data to the tree • Before we add a path into the tree, we need to check the bandwidth distribution among the tree and along the path
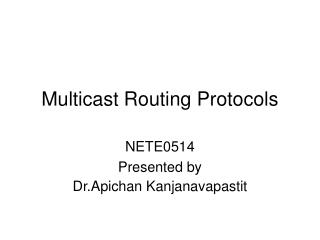
More Details about STM • During the process of constructing the tree, we keep bandwidth information for all the nodes already in the tree: • Br(i): the amount of bandwidth that could be injected into the sub-tree rooted at i • Brf(i) = min{Br(j), for all neighbors j of i} • When a node xn is going to connected to node x in tree via path P(x,xn), three conditions need to be satisfied • Bottleneck bandwidth along path P(x,xn) >= B(T) • Bottleneck bandwidth along path P(xn,x) >= Bxn • Brf(x) >= Bxn
More traffic could flow into the tree from x? B>Bxn? x xn B>B(T)? Partial tree 3 3 34 1 1 1 6 4 1 1 25 Choosing path P(0-4-2) From node 0 9 20 0 0 Brf(0) >1 B(2->4), B(4-->0) > 1 B(0->4,4->2) >2 1 3 2 2 0 15 2 4 13 5 3 4 2 4 Brf(0) = 5 Brf(1)=0 B(T)=2
Time complexity • Time complexity of three algorithms • m, number of multicast group • n, number of nodes in network • e, number of edges in network • m(n+e)n2 FTM • m2ne STM • m3n2 GTM
Simulations • Random Graph generation • Nodes are randomly placed on rectangle grids • Node are connected with the probability function • P(u,v) = exp(-d(u,v)/L) • = 0.3 , =0.4, d(u,v) is the distance between u and v, L is the possible longest path length • Each edge is assigned a cost of 1 • Bandwidth along the edge is either assigned uniformly between the maximal and minimal value or assigned an equal value • Each multicast group member consumes bandwidth of 1
Algorithms Performance study • All the simulation test are run on the three algorithms described above • Tree Cost: Working on a graph size of 100 • Light Load (bandwidth >> required) • Each edge is assigned bandwidth of 100 • Group size varies from 5-40, all member nodes are source nodes • Heavy Load • The bandwidth of the each edge is in the range of 4-8 • Number of sources is fixed as 5, group size varies from 5-40
Performance study continued… • How many active sessions can be accepted simultaneously with the routing algorithm? • Network size of 80, each edge is assigned bandwidth of 100, all sessions have same size of groups, varying from 5 to 40 • Static run • Feed as many sessions as the algorithm allows. Active sessions never leave • Dynamic run • Sessions come in as a Poisson process (), the lifetime of the sessions has an exponential distribution( average x)
Parameter selection for dynamic run • Number of sessions coming between two departures x • Select x larger than maximal number allowed during static run
Conclusions • Advantages of STM • It generates a group-shared tree, reduce the administrative overhead • Tree construction is incremental. It is easy to change the tree structure when member nodes join or leave, allowing dynamic membership. • The simulations results show that • Concerning the tree cost, STM performs as well as GTM, better than FTM • Concerning the number of active sessions a network could accept, FTM performs best, STM perform better than GTM
Acknowledgement • Aiguo Fei