Download
1 / 20
230 likes | 373 Views
Robust Composite Nonlinear Feedback Control With Application to a Servo Positioning System. IEEE Transactions on Industrial Electronics, Vol.54, No.2,April 2007 Guoyang Cheng, Member, IEEE, and Kemao Peng, Member, IEEE. 學生:黃允葳 指導老師:曾慶耀 老師. Outline. Introduction Robust CNF Control

E N D
Robust Composite Nonlinear Feedback Control With Application to a Servo Positioning System IEEETransactions on Industrial Electronics, Vol.54, No.2,April 2007 Guoyang Cheng, Member, IEEE,and Kemao Peng, Member, IEEE 學生:黃允葳 指導老師:曾慶耀 老師
Outline • Introduction • Robust CNF Control • Application in a Servo Positioning System • Conclusion
Introduction • Proposing a new robust CNF control method to achieve fast and accurate set-point tracking for linear systems • The basic idea is to incorporate -Disturbance estimation -Disturbance compensation into the framework of the original CNF control
Robust CNF Control(1/7) • A linear system with amplitude-constrained actuator characterized by
Robust CNF Control(2/7) • Taking the disturbance as a state variable to form an equation as • Augmenting w into the given system as
Robust CNF Control(3/7) • The four steps of the design of robust CNF control law 1) Design a linear state feedback with a disturbance compensation term as
Robust CNF Control(4/7) 2) To solve the Lyapunov equation for P>0. Then define and
Robust CNF Control(5/7) • The nonlinear feedback portion is then given by
Robust CNF Control(6/7) 3) A reduced-order observer will be designed to estimate the state variables and disturbance. It is given as follows:
Robust CNF Control(7/7) 4) Combining the previous steps to form a robust CNF control law:
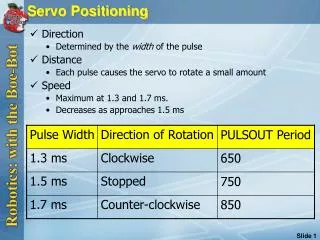
Application in a Servo Positioning System(1/5) • The servo motor can be typically modeled as the following second-order system:
Application in a Servo Positioning System(2/5) • First, design a linear state feedback law
Application in a Servo Positioning System(3/5) • Choosing the matrix W to be • Solving the Lyapunov equation for a positive definite matrix P:
Application in a Servo Positioning System(4/5) • The nonlinear feedback part of CNF as follows: • The reduced-order robust CNF controller for the servo motor:
Application in a Servo Positioning System(5/5) • The control input u is as follows:
Conclusion • The servo system with the robust CNF is capable of fast and accurate settling, and is more robust compared to the previous work with integration action. • This method is able to achieve superior transient and steady-state set-point tracking performance for linear systems.