Download
1 / 39
390 likes | 492 Views
Direct Methods for Linear Systems. Lecture 3 Alessandra Nardi. Thanks to Prof. Jacob White, Suvranu De, Deepak Ramaswamy, Michal Rewienski, and Karen Veroy. Last lecture review. Formulation of circuit equations Conservation laws (KCL, KVL) Branch constitutive equations (BCE)

E N D
Direct Methods for Linear Systems Lecture 3 Alessandra Nardi Thanks to Prof. Jacob White, Suvranu De, Deepak Ramaswamy, Michal Rewienski, and Karen Veroy
Last lecture review • Formulation of circuit equations • Conservation laws (KCL, KVL) • Branch constitutive equations (BCE) • KCL, KVL, BCE combined in different ways: • STA • MNA
Outline • Systems of linear equations • Existence and uniqueness review • Gaussian Elimination basics • LU factorization • Pivoting
Systems of linear equations • Problem to solve: M x = b • Given M x = b : • Is there a solution? • Is the solution unique?
Systems of linear equations Find a set of weights x so that the weighted sum of the columns of the matrix M is equal to the right hand side b
Systems of linear equations - Existence A solution exists when b is in the span of the columns of M A solution exists if: There exist weights, x1, …., xN, such that:
Systems of linear equations - Uniqueness Suppose there exist weights, y1, …., yN, not all zero, such that: Then: Mx = b Mx + My= b M(x+y) = b A solution is unique only if the columns of M are linearlyindependent.
Systems of linear equations Square matrices • Given Mx = b, where M is square • If a solution exists for any b, then the solution for a specific b is unique. For a solution to exist for any b, the columns of M must span all N-length vectors. Since there are only N columns of the matrix M to span this space, these vectors must be linearly independent. A square matrix with linearly independent columns is said to be nonsingular.
Application Problems • Matrix is n x n • Often symmetric and diagonally dominant • Nonsingular of real numbers
Methods for solving linear equations • Direct methods: find the exact solution in a finite number of steps • Iterative methods: produce a sequence a sequence of approximate solutions hopefully converging to the exact solution
Gaussian Elimination Basics Gaussian Elimination Method for Solving M x = b • A “Direct” Method Finite Termination for exact result (ignoring roundoff) • Produces accurate results for a broad range of matrices • Computationally Expensive
Gaussian Elimination Basics Reminder by 3x3 example
Gaussian Elimination Basics – Key idea Use Eqn 1 to Eliminate x1 from Eqn 2 and 3
Pivot MULTIPLIERS GE Basics – Key idea in the matrix Remove x1 from eqn 2 and eqn 3
Pivot Multiplier GE Basics – Key idea in the matrix Remove x2 from eqn 3
GE Basics – Simplify the notation Remove x1 from eqn 2 and eqn 3
Pivot Multiplier GE Basics – Simplify the notation Remove x2 from eqn 3
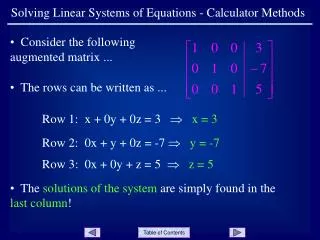
Altered During GE GE Basics – GE yields triangular system ~ ~
GE basics: summary (1)M x = b U x = y Equivalent system U: upper trg (2) Noticed that: Ly = b L: unit lower trg • U x = y LU x = b M x = b GE Efficient way of implementing GE: LU factorization
M = L U = Gaussian Elimination Basics Solve M x = b Step 1 Step 2 Forward Elimination Solve L y = b Step 3 Backward Substitution Solve U x = y Note: Changing RHS does not imply to recompute LU factorization
Pivot Multiplier LU BasicsSource-row oriented approach algorithm For i = 1 to n-1 {“For each source row” For j = i+1 to n {“For each target row below the source” For k = i+1 to n {“For each row element beyond Pivot” } } }
LU BasicsTarget-row oriented approach algorithm For i = 2 to n {“For each target row” For j = 1 to i-1 {“For each source row above the target” For k = j+1 to n {“For each row element beyond Pivot” } } } Pivot Multiplier
k k Factored Portion Multipliers Factored Portion Mult k k Active Set Active Set LU – Source-row and Target-row Source-Row oriented approach Target-Row oriented approach
Pivot multipliers Multiplier Multiply-adds LU Basics – Computational Complexity For i = 1 to n-1 {“For each Row” For j = i+1 to n {“For each target Row below the source” For k = i+1 to n {“For each Row element beyond Pivot” } } }
LU Basics – Limitations of the naïve approach • Zero Pivots • Small Pivots (Round-off error) • both can be solved with partial pivoting
LU Basics – Partial pivoting for zero pivots At Step i Multipliers Factored Portion Row i (L) Row j What if Cannot form Simple Fix (Partial Pivoting) If Find Swap Rowj with i
LU Basics – Partial pivoting for zero pivots Two Important Theorems • ) Partial pivoting (swapping rows) always succeeds if M is non singular • ) LU factorization applied to a diagonally dominant matrix will never produce a zero pivot
LU Basics – Partial pivoting for small pivots GE Rounded to 3 digits
LU Basics – Partial pivoting for small pivots An Aside on Floating Point Arithmetic Double precision number 64 bits sign 52 bits 11 bits Basic Problem • Avoid sum and subtraction of large and tiny numbers • Avoid big multipliers
LU Basics – Partial pivoting for small pivots Partial Pivoting for Roundoff reduction Small Multipliers
LU Basics – Partial pivoting for small pivots swap GE Rounded to 3 digits
k k k k Pivoting strategies • Partial Pivoting: • Only row interchange • Complete Pivoting • Row and Column interchange • Threshold Pivoting • Only if prospective pivot is found to be smaller than a certain threshold
Summary • Existence and uniqueness review • Gaussian elimination basics • GE basics • LU factorization • Pivoting