Download
1 / 81
860 likes | 1.09k Views
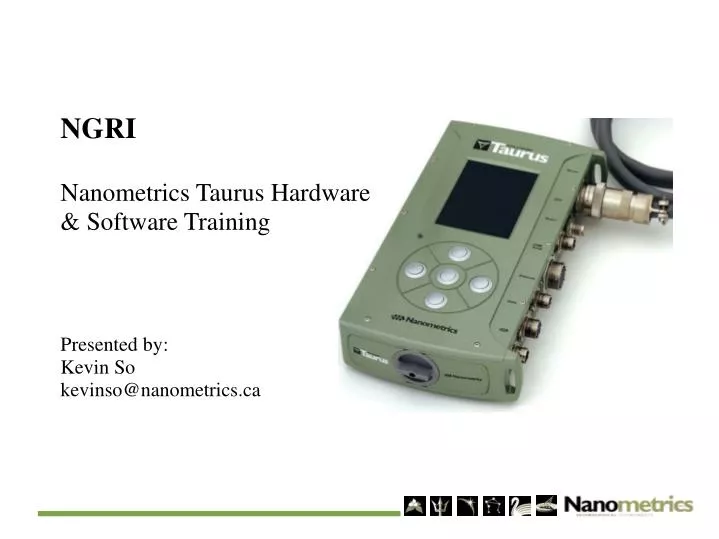
NGRI Nanometrics Taurus Hardware & Software Training Presented by: Kevin So kevinso@nanometrics.ca. 1-Week Agenda. Mon, Aug 15: Taurus Introduction, Hardware and Software overview Tue, Aug 16: Taurus configuration Wed, Aug 17: Taurus Field Deployment and data collection

E N D
NGRI Nanometrics Taurus Hardware & Software Training Presented by: Kevin So kevinso@nanometrics.ca
1-Week Agenda Mon, Aug 15: Taurus Introduction, Hardware and Software overview Tue, Aug 16: Taurus configuration Wed, Aug 17: Taurus Field Deployment and data collection Thu, Aug 18: Taurus Field Deployment, data retrieval & analysis Fri, Aug 19: Taurus Review
Introduction Outline • What is a Taurus? • Mechanical Specifications • Environmental Specifications • Electrical Specifications • System Architecture
What is a Taurus? Broadband Seismometer (Trillium 240) Data Acquisition Server (NAQS) Portable Digital Seismograph (Taurus) Geophone (Mark L-4) Data Analysis
What is a Taurus? • All-in-one, handheld, seismograph. • Truly portable. • User friendly. • Low power, 650mW capable. • CF or ATA disk drive recording media. • Linux OS • Web browser user interface. • IP communications.
Mechanical Specifications • Machined aluminum case construction. • Weight: 1.8 kg. • 3.5” Colour LCD (320 x 240) • IP-67 Compliant (with connector caps on). • Multi-colour status indicator LED. • Scratch and chip resistant finishing. • Keyed connectors to prevent wrong cable plug-in.
Environmental Specifications • Operating Temperatures (w/o insulation) • With Compact Flash media: -20o C to 60o C • With IDE disk drive media: 5o C to 55o C • Humidity: 0-100% non-condensing
Electrical Specifications • Sensor Inputs • Channels: 3 channels (user configurable) • Input voltage range: 40 V peak-to-peak differential • Hardware Gain: 0.4, 1, 2, 4, 8 (user configurable) • Software Gain: 0.001 to 100 (user configurable) • High Pass Filter: user configurable
Electrical Specifications • Sensor Control • Sensor Type: Active or Passive • Power support: 9 – 36V DC • Power on/off: user selectable • Short circuit protection • Control lines: 6 user configurable (logic levels) • Supporting Mass lock/unlock, mass center, cal enable, etc.
Electrical Specifications • Digitiser Performance • Dynamic range: > 138 dB • Sampling rates: 10, 20, 40, 50, 80, 100, 120, 200, 250 Hz
Electrical Specifications • Calibration Output • Signal output: sine wave, pulse signal, pseudo-random binary • Mode: voltage or current • Initialization: user interface
Electrical Specifications • Timing System • Internal VCXO clock disciplined to GPS • Timing accuracy < 100 μS • GPS Receiver: 8 channels • GPS Antenna: external, weatherized, with 5 m cable • Duty Cycle: user configurable
Electrical Specifications • State-Of-Health • Instrument SOH: voltage, mass position, GPS status, instrument temp. • User SOH: 4 external user accessible SOH channels • Logging: configuration changes, software messages
Electrical Specifications • Data Storage • Removable media: Compact Flash or 1.8” ATA disk drive. • Capacity support: • Compact Flash 1-8 GB. • IDE disk drive 20-60 GB. • Duration: > 600 days of 3 channels @ 100 sps w/40 GB ATA disk drive. • Recording mode: continuous ringbuffer. • Storage Format: Nanometrics STORE. • Data Extraction: streaming and miniSEED
Electrical Specifications • Communications • Interfaces: 10/100 Base-T Ethernet, RS-232 serial. • Protocols: UDP/IP (unicast/multicast), HTTP, RS-232 with IP drivers.
Electrical Specifications • Power • Input range: 9 to 36 V DC. • Protection: fuseless design, reverse polarity, short circuit. • Low voltage disconnect: user configurable. • Power Consumption: • Ultra low: 0.650W @ 12V, buffered mode with CF • Low: 1.1W @ 12V, buffered mode with IDE disk drive • Mid: 1.5W @ 12V, communications mode, ethernet or serial • High: 3.5W @ 12V, communications mode, LCD, configuration
System Architecture • Analog Processor (TAP) • 3 channels 24-bit data channels, calibration circuit • Digital Processor (TDP) • DSP, filtering, GPS engine, timing • Control Processor (TCP) • Linux OS, 128 MB RAM, 64 MB Flash, comms. interface, java based code • Backplane (TBC) • connectors, internally soldered
Hardware Overview • Connector Overview • Button Layout and Functions • Status LEDs • Installing Removable Media • Powering up • Powering down • Accessing the Taurus
Connector Overview • 7 external MIL spec connectors. • 1 internal, behind the media door. • All connectors are keyed and are different in sizes. • No duplicate connectors.
Connector Overview… NMXbus SOH Ethernet Serial/USB Power GPS Sensor Antenna
Connector Overview… • Sensor Connector • 26-pin female mil circular • Primary data channels • Sensor control lines • Switchable sensor power
Connector Overview… • Sensor Connector
Connector Overview… • GPS Antenna • TNC female • Active antenna (3.3V)
Connector Overview… • Power • 3-pin male mil circular • 9-36 VDC
Connector Overview… • Serial/USB • 19-pin female mil circular • Serial ports 1 & 2 • USB (5V, 100mA)
Connector Overview… • Serial/USB
Connector Overview… • Ethernet • 4-pin female mil circular • Supports 10/100 Base-T • Auto-Sensing
Connector Overview… • SOH • 7-pin female mil circular • 4 analog SOH inputs • 3.3V @ 10mA power output
Connector Overview… • NMXbus • 4-pin male mil circular • Provides data and power • Allows daisy chaining
Connector Overview… • Mini USB • Behind media bay door • Type B
5-Button Layout and Functions Move Up (moves through options in drop down menu) Enter Shift-Tab (back one field/link) Tab (next field/link) Move Down (moves through options in drop down menu)
Taurus Navigation: Menus 5-button pad
Taurus Navigation: Fields/Links 5-button pad
Status LEDs • 4 status LEDs • 2 for Unit Status • 1 for Ethernet connection / activity • 1 for Media Access status Unit Status Unit Status Ethernet Status Media Status
Status LEDs… Unit Status LED: Off – Digitiser is powered off. Solid Red – Digitiser is booting up. Normal conditions to capture data: Fast Blinking Green – GUI is starting up. Slow Blinking Green – normal operation. Fast Blinking Orange – power up, unit boot up. Warning conditions: Slow Blinking Orange after power up – media door open, low battery, poor GPS timing.
Status LEDs… Critical Fault Status: Fast Blinking Red – fault preventing normal operation. • Disconnected GPS • Missing media • Hardware problem • Software problem
Status LEDs… • Ethernet Status LED Off – processor is powered down. Orange – processor is booting. Blinking Green – network configured, carrier detected. Blinking Orange – network is not configured. Blinking Red – network is configured, no carrier detected.
Status LEDs… • Media Access Status LED Off – media door closed or pressed in. Green – removable media (CF/IDE) can safely be removed. Red – removable media is mounted, in write mode, DO NOT remove.
Installing Removable Media • Always power down the Taurus Processor before adding, removing or changing the media (CF/IDE). You may lose data if the media is removed while the Taurus Processor is running. You may lose data if the media is not inserted before the buffer fills-up.
Installing Removable Media… • Lift the plastic lever on the media door. • Twist the door knob counter clockwise to the unlocked position (lever is vertical). • Flip the lever flat against the door, allowing the handle to push against the chassis and causing the door to pop free/open.
Installing Removable Media… • Make sure Media Access LED is green OR the power is off. • Gently pull on the end of the CF/IDE to remove it. • Gently insert the replacement CF/IDE.
Inserting Removable Media… • Place and push the media door in place. • Twist the knob clockwise to the locked position (horizontal). • Flip the black plastic lever down as to lie flat against the door as shown.
Powering Up • Basic Steps: • Connect the GPS, sensor and ethernet cables (if applicable). • Connect the power cable (9-36 V DC). • Wait for the Taurus processor to boot up (~1 minute). • LCD will be off, Unit Status LEDs will show status. • Once the Unit Status LEDs are blinking green or orange, you may start the GUI. • Press the center button (Enter key) for about 2 seconds. • Starts web browser GUI, and LCD (~1-2 minutes).
Powering Down • Do not just disconnect the power cable! • Basic Steps: • Go to Shutdown page from the web browser’s drop down menu. • Select the Shutdown option. • Wait for all status LEDs to be turned off to indicate the processor has been shut down. • Disconnect the Taurus power cable.
Accessing the Taurus • From external web browser: • Connect the Taurus using the ethernet cable (15228) to your LAN or computer directly. • Open your browser and go to the Taurus URL: http://Taurus.IP.Address. • The IP address of the Taurus is shown on the Current Status Page of the internal browser.
Software Overview • Software Introduction • Software Modules • Modes of Operation • Data Organization • User Interface • Taurus Configuration • Real-time Data Access • Data Downloading • Software Uploading • System Security
Software Introduction • First true internet device for the seismic market. • Web server based data acquisition system. • “Thin client” approach, no special software required to interact with the Taurus. • A networked Taurus can be accessed from anywhere in the world! • Linux based operating system.
Modes of Operation • Two modes of operation: buffered or communications. • Buffered: • Stand alone, unattended continuous data recording, no comms. • Lowest power consumption. • ADC/DSP acquires data into internal flash memory buffer. • Linux Processor is powered on to write to removable media when buffer is near full capacity. Processor powers back down until next write event. • Communications: • Continuous write to removable media. • Taurus and data are accessible via ethernet or serial ports. • Streaming to data acquisition server capable.