Download
1 / 6
60 likes | 156 Views
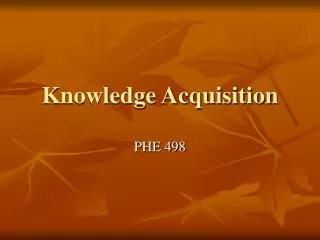
Forms of Robot Knowledge Acquisition. Tom Henderson University of Utah School of Computing 6 October 2010 Schloss Dagstuhl Wadern , Germany. Standard Knowledge Acquisition Mechanisms. Sensors. Percepts. Experiential Learning. Inferential Learning. Knowledge. Planning. Actuators.

E N D
Forms of Robot Knowledge Acquisition Tom Henderson University of Utah School of Computing 6 October 2010 SchlossDagstuhl Wadern, Germany
Standard Knowledge Acquisition Mechanisms Sensors Percepts Experiential Learning Inferential Learning Knowledge Planning Actuators
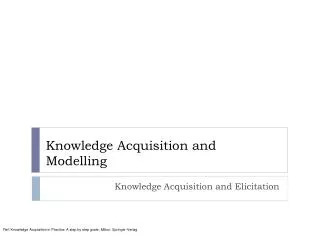
Knowledge Sharing Mechanisms 2. Knowledge Sharing: Data 1. Knowledge Sharing: Direct Sensors Percepts Experiential Learning Inferential Learning Knowledge Planning 3. Knowledge Sharing: Algorithms (Code) Actuators
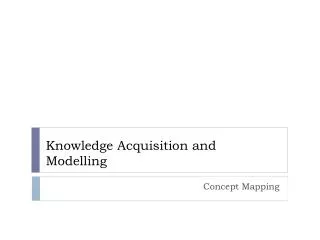
Robot Direct Knowledge Sharing • Web permits robots to download knowledge directly into memory • Types: • Directly add to knowledge base structures • Data • Algorithms (including actuation) • Executable code (if common platforms)
Other Types of Sharing: Use Hardware (Sensors & Actuators): Swap in Desired HW: e.g., Reactive System Sensors Actuators
Other Types of Sharing: Teleoperation of Hardware (Sensors & Actuators): Human Sensors Actuators