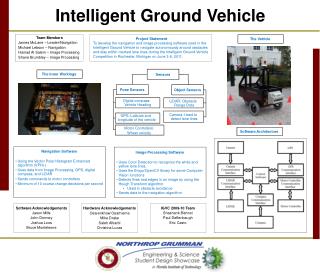
Download
1 / 15
300 likes | 966 Views
Intelligent Vehicle-Highway Systems. Shankar Sastry. California PATH. University of California, Berkeley. (Joint work with Datta Godbole, John Lygeros, Raja Sengupta & Shankar Sastry). Intelligent Vehicle-Highway Systems (IVHS). Partially or fully automate driving on the highways

E N D
Intelligent Vehicle-Highway Systems Shankar Sastry California PATH University of California, Berkeley (Joint work with Datta Godbole, John Lygeros, Raja Sengupta & Shankar Sastry) University of California, Berkeley
Intelligent Vehicle-Highway Systems (IVHS) • Partially or fully automate driving on the highways • can increase driving comfort and reduce stress • potential for increased safety • 90% of all accidents are attributed to human error • Although many more hazards are successfully handled by humans. • Automation can induce structured environment and tight control resulting in high capacity, less pollution & guaranteed travel times • Types of Automation • Driver Warning & Assistance (e.g., Blind Spot Warning) • Emergency Control (ABS,Daimler Chrysler schemes) • Control of Repetitive Tasks (Adaptive Cruise Control) • Complete Control (Automated Highway Systems) University of California, Berkeley
Control Problems in IVHS • Objectives • Increase safety & efficiency of the existing highway infrastructure • objectives of the individual users and the system may not match • Characteristics • Control Design: Multiple Agents Compete for Scarce Resources • Centralized control can yield optimal solutions but may be too complex and unreliable (danger of single point failure) • Decentralized control increases reliability but may result in non-optimal or even unsafe solutions. • Performance Evaluation • Performance metrics specified in terms of overall system whereas controllers designed for individual vehicles • Evaluation in the uncertain environment of partial automation University of California, Berkeley
Automated Highway System • Fully Automated Vehicles Operating on Dedicated Lanes • Involves control of individual vehicles as well as their collective behavior • Conflicting Objectives • Safety & Capacity • Travel Time & Throughput (Individual vs System Optimal) • Definition of Safety • Ideally no collisions • Allowing low relative velocity collisions results in two acceptable longitudinal vehicle following configurations • Following very close (platoon follower) • Following at sufficiently large distance (platoon leader) University of California, Berkeley
Automated Platoons on I-15 University of California, Berkeley
Entry Network • Flow optimization Link • Dynamic routing • Maneuver selection • inter-vehicle comm Coordination • Lane keeping • Vehicle following Regulation Control of Automated Highway Systems • Design of vehicle controllers & performance estimation • Two concepts • platooning & individual vehicles Join Speed, vehicle following Lane Change Platoon Following Split Exit University of California, Berkeley
Vehicle Following & Lane Changing • Control actions: (vehicle i) -- braking, lane change • Disturbances: (generated by neighboring vehicles) -- deceleration of the preceding vehicle -- preceding vehicle colliding with the vehicle ahead of it -- lane change resulting in a different preceding vehicles -- appearance of an obstacle in front • Operational conditions: • state of vehicle i with respect to traffic i i-1 i-2 j University of California, Berkeley
Game Theoretic Formulation • Requirements • Safety (no collision) • Passenger Comfort • Efficiency • trajectory tracking (depends on the maneuver) • Safe controller (J1): Solve a two-person zero-sum game • saddle solution (u1*,d1*) given by • Both vehicles i and i-1 applying maximum braking • Both collisions occur at T=0 and with maximum impact University of California, Berkeley
Safe Vehicle Following Controller • Partition the state space into safe & unsafe sets • Design comfortable and • efficient controllers in • the interior • IEEE TVT 11/94 • Safe set characterization • also provides sufficient • conditions for lane change • CDC 97, CDC98 University of California, Berkeley
Automated Highway System Safety • Theorem 1: (Individual vehicle based AHS) • An individual vehicle based AHS can be designed to produce no inter-vehicle collisions, • moreover disturbances attenuate along the vehicle string. • Theorem 2: (Platoon based AHS) • Assuming that platoon follower operation does not result in any collisions even with a possible inter-platoon collision during join/split, a platoon based AHS can be safe under low relative velocity collision criterion. • References • Lygeros, Godbole, Sastry, IEEE TAC, April 1998 • Godbole, Lygeros, IEEE TVT, Nov. 1994 University of California, Berkeley
AHS Performance Evaluation • Estimate maximum per lane capacity as a function of • vehicle braking rates, delays, types of coordination • Individual vehicles can increase highway capacity by a factor of two: • on-line estimation of braking capability • Platooning provides similar capacity with the possibility of low impact velocity collisions • Consider: emergency deceleration for obstacle avoidance • differences in delays & braking rates give rise to multiple and severe intra-platoon collisions requiring larger separation between two platoons • References • Carbaugh, Godbole, Sengupta, Transportation Research-C, 98 • Godbole, Lygeros, Transportation Research-C, 99 University of California, Berkeley
Highway Capacity Estimate (Single-Lane) N=Platoon size • Queuing Analysis • Up to 20% capacity loss • due to entry and exit • Up to 15% loss due • to lane changes • Platoon Join/Split ?? • References • Transportation Research • part-C: 1998, 1999 University of California, Berkeley
Fault Management • Faults induce switching of control strategies at multiple levels of hierarchy to maintain safety and minimize performance degradation • Design of fault management system • fault identification (distributed observation) • fault classification • fault handling • minimal set of new maneuvers • fault localization • verified logical correctness of communication protocols • Need for probabilistic verification • worst-case design can not produce a safe system with faults • given component reliability & Pd-fa characteristic of fault identification algorithms, compute probability of collisions. University of California, Berkeley
Network • Flow optimization • Dynamic routing • Safe & efficient • Control Switching • Inter-vehicle comm Link • Dynamic routing • Safe & efficient • Control Switching • Inter-vehicle comm Coordination • Multi-Objective • Control Design • Multi-Objective • Control Design Regulation AHS Control Architecture Fault Mode i Network • Flow optimization Fault Mode j Network • Flow optimization Link • Dynamic routing Link • Safe & efficient • Control Switching • Inter-vehicle comm Coordination Analysis Methods and Tools Coordination • Multi-Objective • Control Design Regulation System Performance Regulation Operating Scenario University of California, Berkeley
Deployment of AHS • Partial Automation yields progressive deployment path • Lack of structured environment • Lack of the knowledge of other driver’s intentions • Greedy driving policies • Human factors issues are highly pronounced • false alarms, nuisance alarms, driver attentiveness, risk compensation, role confusion (Godbole et. al. TRB 98; James Kuchar at MIT) • Designing concepts for partial automation • ACC only roadway with infrastructure assisted entry • (Godbole et. al. TRB 99) • Benefit Evaluation of partial automation systems • Hierarchical benefit evaluation methodology that integrates analysis, simulation and experimentation results • adopted by NHTSA for crash avoidance systems analysis at VOLPE labs University of California, Berkeley