Download
1 / 14
150 likes | 386 Views
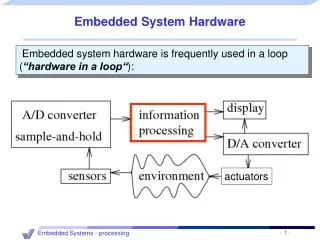
Embedded System: l’airbag. Sistema di sicurezza passiva costituito da:. Sacco in kevlar a protezione del passeggero; Capsula esplosiva con innesco; Sensori di rilevamento dell’impatto; Processore embedded di gestione del sistema. Sacco.

E N D
Sistema di sicurezza passivacostituito da: • Sacco in kevlar a protezione del passeggero; • Capsula esplosiva con innesco; • Sensori di rilevamento dell’impatto; • Processore embedded di gestione del sistema.
Sacco • Il suo compito è quello di evitare il contatto fra la testa del passeggero e il volante e assorbire la forza d’urto • Il tempo di apertura è di circa 40ms e lo stesso tempo è necessario per sgonfiare il pallone così da non ostacolare le vie respiratorie del passeggero e permettergli una veloce fuoriuscita dall’abitacolo I=F*∆T Nel caso d’impatto si genera un impulso di intensità I, l’airbag agisce aumentando il tempo di contatto riducendo così la forza agente sul passeggero.
Innesco • Sacco e sistema di innesco contenuti nel volante e nel cruscotto • Reazione a base di azoturo di sodio (tossico) per generare azoto in forma gassosa (innocuo) • Reazioni innescate dal calore prodotto dalla corrente generata dai sensori circa 10ms dopo l’urto
Sensori 1. Accelerometro • di tipo meccanico: a magneti a massa sospesa • di tipo elettronico: costituito da più componenti può contenere anche intelligenza locale
Sensori AMPLIFICATORE SENSORE Esempio di sensore con intelligenza locale DSP CONVERTITORE D/A CONVERTITORE A/D FILTRO CIRCUITO DI SELF-TEST INTERFACCIA SERIALE
Sensori 2. Roll-over • Sistema che rileva un possibile ribaltamento dell’auto • Costituito da: Valuta la rotazione attorno all’asse longitudinale • Sensore di imbardata • Due sensori di accelerazione Misurano l’accelerazione In direzione trasversale e In altezza
Sensori 3. Di posizione • Sensori-vite: misurano il peso del passeggero tramite la corsa delle viti che fissano il sedile al telaio dell’auto; • Sensori capacitivi: misurando la carica sugli elettrodi si possono ricavare informazioni sulla morfologia del passeggero; • Sensori tridimensionali: un fascio di luce modulata va ad illuminare il sedile e dalla differenza di fase tra il segnale di partenza e quello riflesso si ricava la distanza per poi valutare se è presente il passeggero e il tipo.
Sistema di controllo È costituito da: • Una memoria RAM per registrare i dati provenienti dai sensori EEPROM contenente i dati per effettuare il il confronto e in cui si memorizzano dati relativi ad avvenuti incidenti(Recording Crash Event Data) • Un DSP per effettuare il confronto tra i dati dei sensori e quelli memorizzati ed attivare o meno l’apertura degli airbag • Un accumulatore di riserva se non arriva energia dalla batteria permette di attivare entro 100ms i sistemi di sicurezza in di urto • Un sistema di diagnostica • Convertitori e filtri
Esempio di algoritmo di controllo:“Two stage fuzzy algorithm” • Distinzione tra: urto lieve, non attivazione dell’airbag urto a media velocità, attivazione entro 40-60ms urto ad elevata velocità, attivazione entro 10-20ms • Ingressi dell’ISIC: _disp1: spostamento durante un predeterminato periodo; _disp2: spostamento totale; _njerk: numero di volte in cui il jerk supera una certa soglia dopo che l’accelerazione ha superato la soglia; _tw: tempo intercorso fra il superamento della soglia di accelerazione e il primo superamento della soglia di jerk. Prima fase(0-10ms): osservazione di disp1 per riconoscere subito incidenti gravi e attivare l’airbag; Seconda fase(10-40ms): valutazione attraverso tutti e quattro gli ingressi del tipo di incidente tramite tabella associativa e conseguente azione.
Affidabilità • Componenti: conoscere l’incertezza dei dati ottenuti dai sensori, la sensibilità ai disturbi dei sistemi di memorizzazione e la probabilità di errore degli algoritmi. • Scelta dell’architettura: single sensing system distributed sensing system crush-zone sensor non crush-zone sensor • Controllo con self-test dei componenti e del funzionamento del sistema in generale, segnalando eventuali malfunzionamenti.
Numero di sensori • Distributed sensing system (System failure)=(Non crush failure) OR(Simultaneous failure of all crush) • Single sensing system (System failure)=(Accelerometer failure) OR (Simultaneous failure of all sensing algorithm) OR (Arming sensor failure) Vulnerabilità del sistema legata all’affidabilità del sensore nella non crush-zone. Utilizzo di più sensori in parallelo per minimizzare l’errore dei sensori nella crush-zone. Usato per evitare l’attivazione dei sensori a causa di interferenze EM. Affidabilità del sistema legata all’utilizzo di più algoritmi indipendenti fra loro.
Collocazione dei sensori Sensore posizionato nella non crush-zone Sensore posizionato nella crush-zone • Per avere concordanza di risposte e attivazioni simultanee i sensori della non crush-zone devono essere più sensibili e più veloci rispetto agli altri.
Conclusioni • L’airbag ha ridotto del 30% le morti per incidenti stradali; • Continui studi per adattare il sistema al tipo di passeggero: Smart airbag con palloni a doppio strato di apertura e altri sensori per individuare più precisamente la posizione dei viaggiatori.