Download
1 / 15
150 likes | 309 Views
Proving that a Valid Inequality is Facet-defining. Ref: W, p144-147. X Z + n . For simplicity, assume conv (X) bounded and full-dimensional. Consider example, X = {(x, y) R + m B 1 : i =1 m x i my}.

E N D
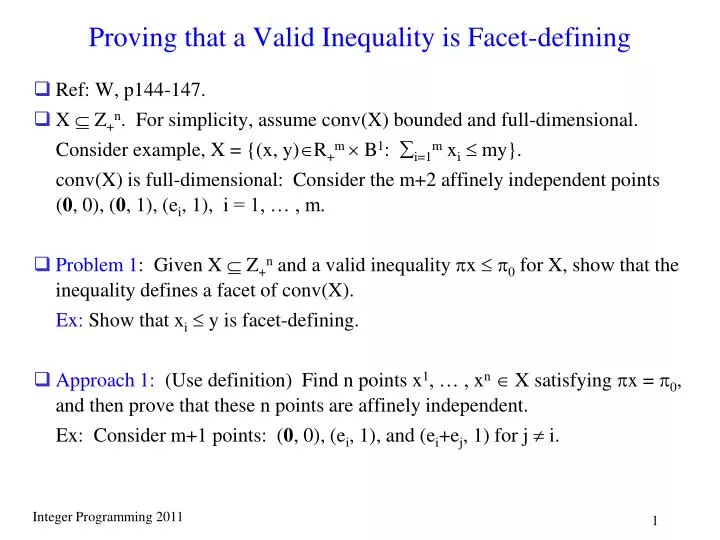
Proving that a Valid Inequality is Facet-defining • Ref: W, p144-147. • X Z+n. For simplicity, assume conv(X) bounded and full-dimensional. Consider example, X = {(x, y)R+m B1: i=1m xi my}. conv(X) is full-dimensional: Consider the m+2 affinely independent points (0, 0), (0, 1), (ei, 1), i = 1, … , m. • Problem 1: Given X Z+n and a valid inequality x 0 for X, show that the inequality defines a facet of conv(X). Ex: Show that xi y is facet-defining. • Approach 1: (Use definition) Find n points x1, … , xn X satisfying x = 0, and then prove that these n points are affinely independent. Ex: Consider m+1 points: (0, 0), (ei, 1), and (ei+ej, 1) for j i.
Approach 2: (indirect but useful way, see Thm 3.5, 3.6) • Select t n points x1, … , xt X satisfying x = 0. Suppose that all these points lie on a generic hyperplanex = 0. • Solve the linear equation system j=1n jxjk = 0 for k = 1, … , t in the n+1 unknowns (, 0). • If the only solution is (, 0) = (, 0) for 0, then the inequality x 0 is facet-defining. Ex: Show xi y is facet-defining. Select points (0, 0), (ei, 1), (ei+ej, 1) for j i that are feasible and satisfy xi= y. As (0, 0) lies on i=1m ixi + m+1y = 0, 0 = 0. As (ei, 1) lies on the hyperplanei=1m ixi + m+1y = 0, i = -m+1. As (ei+ej, 1) lies on the hyperplanei=1m ixi- iy= 0, j = 0 for j i. So the hyperplane is ixi - iy= 0, and xi y is facet-defining.
If conv(X) is not full-dimensional, we use Thm 3.6 in the previous slides. Refer Proposition 3.5 on p.274 for a possible application of Thm 3.6.
4. Describing Polyhedra by Extreme Points and Extreme Rays • Prop 4.1: If P = {xRn: Ax b} and rank(A) = n-k, P has a face of dimension k and no proper face of lower dimension. Pf) For any face F P, rank(AF=, bF=) n-k dim(F) k. (Prop. 2.4) Show F with dim(F) = k. Let F be a face of minimum dimension ( > 0). (If k=0, nothing to prove) Let x* be an inner point of F, dim(F) > 0 y x* F. Consider z() = x* + (y – x*), R1. Suppose z() intersect aix = bi for some i MF. Choose * = min {|i|: i MF, z(i) lines in aix = bi}, and * = |i*|. Then * 0 (x* is an inner point) Fi* = {xP: AF=x = bF=, ai*x = bi*} is a face of P of smaller dimension than F, which is a contradiction. Hence z() not intersectaix = bi for any i MF. Ax* + A(y-x*) b R1 A(y-x*) = 0 y F F = {y: Ay = Ax*} dim(F) = k since rank(A) = n-k.
Frequently we assume P R+n rank(A) = n P has zero-dimensional faces if P . Assume rank(A) = n hereafter. • Def 4.1: x P is an extreme point of P if there do not exist x1, x2 P, x1 x2 such that x = (1/2)x1 + (1/2)x2. • Prop 4.2: x is an extreme point of P x is a zero-dimensional face of P. Pf) () Suppose x is zero-dimensional face rank(Ax=) = n. (Prop 2.4) Let (A, b) be submatrix of (Ax=, bx=) with A: nn and rank n x = A-1b. If x = (1/2)x1 + (1/2)x2, x1, x2 P, then since Axi b, i = 1, 2, we have Ax1 = Ax2 = b ( Ax = (1/2)Ax1 + (1/2)Ax2 = b, Ax1 b, Ax2 b ) • x1 = x2 = x, so x is an extreme point. () If xP is not a zero-dimensional face of P, then rank(Ax=) < n. (Prop 2.4) y 0 such that Ax=y = 0. For small > 0, let x1 = x + y, x2 = x - y, x1, x2 P. Then x = (1/2)x1 + (1/2)x2, hence x is not an extreme point.
Def 4.2: Let P0 = {r Rn: Ar 0}. (recession cone, characteristic cone of P) If P = {x Rn: Ax b} , then r P0 \ {0} is called a ray of P. • r Rn, r 0 is a ray of P x P, {y Rn: y = x + r, R+1} P. • Note: Cone K is called pointed if K (-K) = {0}. K (-K) is called lineality space of cone K. For P = {x Rn: Ax b}, if rank(A) = n, P0 (-P0) = {r Rn: Ar 0, -Ar 0} = {0}. Hence P0 is guaranteed to be pointed. • Def 4.3: A ray r of P is an extreme ray if there do not exist r1, r2 P0, r1 r2, R+1such that r = (1/2)r1+ (1/2)r2.
Prop 4.3: If P , r extreme ray of P if and only if {r: R+1} is one-dimensional face of P0. Pf) Let Ar= = {ai: iM, air = 0}. If {r: R+1} is a one-dimensional face of P0, rank(Ar=) = n-1 solutions of Ar=y = 0 are y = r, R1. If r = (1/2)r1 + (1/2)r2, get contradiction as in Prop 4.2. If r P0 and rank(Ar=) < n-1, then nullity of Ar= 2. • r* r, R1 such that Ar=r* = 0. Then r = (1/2)r1 + (1/2)r2, where r1 = r + r*, r2 = r - r*. Hence r is not an extreme ray, contradiction. • Cor 4.4: A polyhedron has a finite number of extreme points and extreme rays. • Question: Given P = {xRn: Ax b, x 0} , how can we identify the extreme rays of P0? • Thm 4.5: If P , rank(A) = n, and max{cx: xP} is finite, then there is an optimal solution that is an extreme point. Pf) Set of optimal solution is face F = {xP: cx = c0}. By Prop. 4.1, F contains (n – rank(A))-dimensional face. By Prop. 4.2, F contains an extreme point.
Thm 4.6: extreme points xk, c Zn such that xk is the unique optimal solution of max{cx: x P}. Pf) Let Mxk= be equality set of xk. Let c* = iM=ai, c = c* for some >0 to get integer vector c. Then xP\{xk}, cx = iM=aix < bi = aixk = cxk (Compare with earlier Proposition regarding face.) • Thm 4.7: P , rank(A) = n, max{cx: x P} unbounded, then P has an extreme ray r* with cr* > 0. Pf) {uR+m: uA = c} = from duality of LP By Farkas, r Rn such that Ar 0, cr > 0. Consider max{cr: Ar 0, cr 1} = 1. By Thm 4.5, optimal extreme point solution r*. Equality set of r* is Ar*=r = 0 and cr = 1 rank(Ar*=) = n – 1. r* extreme ray of P (Prop 4.3)
Thm 4.8: (Affine) Minkowski’sThm: finitely constrained finitely generated. P = {xRn: Ax b} , rank(A) = n (existence of extreme point guaranteed) • P = {xRn: x = kK kxk + jJ jrj, k=1, k0, kK, j0, jJ}, Where xk: extreme points of P, rj: extreme rays of P. Pf) Let Q = {xRn: x = kK kxk + jJ jrj, k=1, k0, kK, j0, jJ}. Q P is clear Suppose y P \ Q (i.e. yP, but yQ). Show contradiction. Then not exist , satisfying kK kxk + jJ jrj = y - kK k = -1 k 0 for kK, j 0 for jJ By Farkas’ lemma, (, 0) Rn+1 such that xk - 0 0 for kK, rj 0 for jJ and y - 0> 0. Consider LP max{x: xP} If LP has a finite optimal solution, then an extreme point optimal solution. Have xk - 0 0, but y - 0 > 0 (y > xk k), contradiction. If unbounded, extreme ray rj with rj > 0 (Thm 4.7), contradiction. Hence there does not exist such y, i.e. Q = P
Consider Primal-Dual pair of LP z = max{cx: xP}, P = {xR+n: Ax b} w = min{ub: uQ}, Q = {uR+m: uA c} {xk, kK} extreme points of P, {rj, jJ} extreme rays of P0 {ui, iI} extreme points of Q, {vt, tT} extreme rays of Q0 • Thm of the alternatives: • x such that x 0, Ax b • u such that u 0, uA 0, ub < 0 Pf) Consider primal-dual pair (P) max 0x, Ax b, x 0 (D) min ub, uA 0, u 0
Thm 4.9: • The following are equivalent: • The primal problem is feasible, that is, P ; • vtb 0 for all t T. • The following are equivalent when the primal problem is feasible: • z is unbounded from above; • rj of P with crj> 0; • the dual problem is infeasible, that is, Q = . • If the primal problem is feasible and z is unbounded, then z = maxkKcxk = w = miniIuib. Pf) I) P if and only if vb 0 v R+m with vA 0 (from previous) By Minkowski, Q0 = {vR+m: vA 0} = {vR+m: v = tT tvt, t 0, tT} • vb 0 vQ0 if and only if vtb 0 tT. II) P = {xRn: x = kK kxk + jJ jrj, k=1, k0, kK, j0, jJ} . z bounded if and only if crj 0 jJ. b c: apply (I) to dual (in negation form) III) From strong duality and Minkowski’s theorem to P and Q.
Note: More general form of Minkowski’sthm Decomposition Thm: Suppose P = {xRn: Ax b} Then P = S + K + Q, where S + K is the cone {xRn: Ax 0} S = {xRn: Ax = 0} is the lineality space of S + K K is a pointed cone. K + Q is a pointed polyhedron. Q is a polytope given by the convex hull of extreme points of K + Q.
Projection of a polyhedron: Projection of (x, y) Rn Rp on H = {(x, y): y = 0} is (x, 0). Consider projection of P Rn Rponto y = 0 as a projection from the (x, y)-space to the x-space, denoted by projx(P). (x such that (x, y)P for some yRp) • Thm 4.10: Let P = {(x, y) Rn Rp: Ax + Gy b}, then projx(P) = {xRn: vt(b-Ax) 0 tT}, where {vt}tT are extreme rays of Q = {vR+m: vG = 0} Pf) H = {(x, y)Rn Rp: y = 0} • ProjH(P) = {(x, 0) Rn Rp: (x, y)P for some yRp} {yRp:Gy (b-Ax)} v 0, vG= 0, v(b-Ax) < 0 infeasible v 0, vG= 0, we have v(b-Ax) 0 v(b-Ax) 0 p’Ax p’b for all v Q vt(b-Ax) 0 for all vt T (vtAx vtb )
For Thm 4.10, use the thmof the alternatives: • x such that Ax b • u such that u 0, uA= 0, ub < 0 Pf) Consider primal-dual pair (P) max 0x, Ax b (D) min ub, uA= 0, u 0 • Cor 4.11: Projection of polyhedron is polyhedron.
Cor 4.12: If P = {(x, y) Rn Rp: Ax + Gy b} and {xRn : Dx d}, where D is qn, then Q = projx(P) if and only if: • For i = 1, … , q, dix d0i is a valid inequality for P. • For each x* Q, y* such that (x*, y*) P. Pf) I. is equivalent to Q projx(P). II is equivalent to Q projx(P). • Thm 4.13: (Affine Weyl’s theorem) (finitely generated finitely constrained) If A: m1n, B: m2n, rational matrices and Q = {xRn: x = yA + zB, k=1m1yk = 1, yR+m1, zR+m2}, Then Q is a rational polyhedron. Pf) Q = projx(P), where P = {(x, y, z)Rn R+m1 R+m2 : x – yA – zB = 0, k=1m1yk = 1} (Recall that we used Fourier-Motzkinelimination in IE531.)