Download
1 / 24
250 likes | 356 Views
Production Control. Chapter 21. Competencies. Describe the difference between Jigs and Fixtures Describe the difference between CAD/CAM Define computer integrated manufacturing List essential components of robotics and describe their function

E N D
Production Control Chapter 21 Chapter 21
Competencies • Describe the difference between Jigs and Fixtures • Describe the difference between CAD/CAM • Define computer integrated manufacturing • List essential components of robotics and describe their function • Describe the disadvantage of Just-in-time scheduling Chapter 21
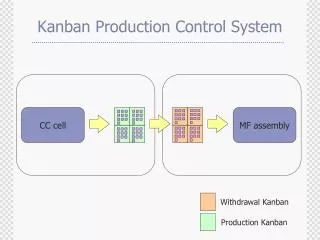
CHARACTERISTICS OF DIFFERENT TYPES OF FACILITIES The most important factor in manufacturing is the rate of production, because it determines which manufacturing processes will be the most efficient for any given product. This system is driven by the customers’ demand (Pull system) Chapter 21
Characteristics Of Different Types Of Facilities • Piecework Production • Small Batch Production (1-20 Parts/Hr.) • Large Batch Or Continuous Processes (20-200 Parts/Hr.) • Mass Production (Over 200 Parts/Hr) Chapter 21
Piecework Production • Defined as the fabrication of one complete unit at a time. • Utilization of equipment is not a great concern since the equipment is not usually shared or tied up continuously for the production run. • Piecework facilities are often batch processes in which products are made individually. Chapter 21
Piecework Production • Jigs and Fixtures • A fixture is a device that is individually designed to hold a specific workpiece in place. Its specific job is to facilitate setup or to make holding easier. • Ex. - Use a fixture to hold a particular plug at an angle for easier soldering. • A jig is a fixture that establishes certain critical location dimensions on the workpiece. • Ex. – Using a jig for the holding and drilling precise holes (into a casting) for the shafts of a three dimensional mechanism. • Work holder is the general term for either a jig or a fixture. A miter box or a bench vise might be a workholder. Chapter 21
Piecework Production • Inspection is the act of determining whether or not the size, shape, and location of all features of the workpiece are consistent with the drawings or other specifications. Inspections are performed by machinists or operators. Chapter 21
Small Batch Production (1-20 Parts/Hr.) • At this rate of production, completed parts begin to take up a significant amount of space before they can be shipped and raw materials are needed at a faster rate than they are with piecework. • Boredom becomes a concern and not only affects the quality of the product, but safety is also affected. Chapter 21
Small Batch Production (1-20 Parts/Hr.) Numerical Control is a way of controlling the action of machines by giving them a set of instructions in numerical form. Computerized Numerical Control • Can be programmed to control several production machines • Can store programs and data that would allow it to track the wear of the cutting tools and automatically compensate for that wear. • Machines were designed with a tool carrier so that tools could be changed by computer control. Chapter 21
Small Batch Production (1-20 Parts/Hr.) Some Problems of CNC • New machines are very expensive and only 5% of the part’s total manufacturing time is it actually on the machine. • Only profitable if it frees up time to supervise more machines or to spend time with the human activities that computers cannot do well Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) • No longer does one person see the part from start to finish. • Scheduling is an important part of this type of manufacturing. • Inspect the parts frequently to detect trends in parts not meeting standards and take corrective action before the parts are so far from the specifications that they are scrap. Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) • Computer-Aided Drafting/ Computer-Automated Manufacturing • Computer-Aided Drafting is a method of drafting that uses a computer to draw on the screen as instructed by an operator. The computer acts only as an “electronic drafting board”; it does not do anything on its own. Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) • Computer Automated Engineering (CAE)is a system that uses a computer to make design drawings, but additionally is capable of doing engineering analysis of the designed object. • Determine the volume and weight of the part and locate its center of mass. • Do a complete structural analysis of the product. • Determine clearances and allowances between matching parts. • Devise the optimum steps for the manufacture of the product. • Create the commands for the computer controlled machines that make the product. • Keep the inventory records and other documentation for the product Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) • Computer-Automated Manufacturingis an approach to organizing a manufacturing plant so that all possible analyses, decisions, and actions are assigned to a master computer. • Typical Computer Operations in CAM • Control the inventory. • Direct the transportation of raw materials, completed products, and parts at different stages during manufacture. • Create machine maintenance schedules. • Control the automatic inspection • Maintain documentation • Control the actions of robots. Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) Robotics Robots have five essential components: • Manipulator - the part of the machine that actually handles the tool, material, or part. • Actuators - respond to the signals from the controller, causing the manipulator to perform its assigned function. • Sensors - detect the positions of the various components of the arm and hand and feed data back to the controller. • Controllers - computers that send control signals to the manipulators and respond to the data fed back to them by the sensors. • Powersupplies - provide the energy that drives the controllers, sensors, manipulators, and actuators. Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) Use of Robots • Manipulators • The robot manipulator must duplicate essentially every movement of the human arm and hand. • Actuators • The “muscles” of the robot mechanism. These may be powered by air, hydraulic fluid, electricity, magnetism, or a vacuum. Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) • Air-operated and vacuum-operated (pneumatic) mechanisms are usually small and limited by the amount of force they can exert, but they are inexpensive to construct and operate. • Hydraulic mechanisms are capable of exerting large forces, are high powered, and are amazingly quick for their size. They do tend to be messy due to the inevitable leakage of hydraulic fluid. • Electrically driven mechanisms are appropriate for light duty. They are very accurate, precise, and clean. • Magnetically driven actuators such as solenoids are very quick but are limited by the amount of force they can exert on the workpiece. Chapter 21
Large Batch Or Continuous Processes (20-200 parts/hr.) • Computer Functions • The “brain” of the robot is the computer that controls the robot. • Control System Functions • If the computer is the ‘brain” of the robotics system, then the control system is its “nervous system.” • Robot Functions • Through its end-of-arm device (“hand”), the robot either picks up the workpiece or does something with it. Chapter 21
Quality Assurance Through Automated Inspection • Quality Control (QC) • Concerned with ensuring that the products meet their design standards • Causes of Product Variation • Inherent Variation is the unavoidable variation in the dimensions of a part due to such causes as flexure of the cutting tool, etc. • AssignableCause is an act or activity that can be identified as the reason why a workpiece deviates. • A manufacturing process is said to be “in control” when the assignable causes have been detected and corrected so that only the inherent variation is left. Chapter 21
Quality Assurance Through Automated Inspection • Statistical Quality Control • the control of the quality of the parts produced by an analysis of the numerical data derived from measurements taken on those parts. • Meeting Drawing Tolerances • If the designer asks for tolerances that are smaller than can be achieved with a machine, then either the tolerances need to be “loosened” or else the process needs to be done on a different machine. Chapter 21
Just-in-Time Scheduling A type of production organization in which the material for a part or assembly is delivered just in time to be used. • Shifts responsibility for quality to the suppliers • Reduce production costs by 20% to 40%. • The drawback to JIT is that the production line is shut down if even one part does not come in “just in time.” Chapter 21
Mass Production (over 200 parts/hr) Constantly focused on reducing fractional costs. (Saving $.20/pc @ 300 pcs./hr. = $600,000/yr. • Adaptive Control • A type of feedback control that senses changes outside of the feedback loop (temperature, pressure, vibration, etc.) and changes the instructions (to the actuators) so that the desired result is still accomplished in spite of the exterior change. Chapter 21
Mass Production (over 200 parts/hr) • Cellular Organization • is a way of organizing a manufacturing facility so that most of the processes are carried out by a small group of machines (the “cell”). Ex. – Combining turning, milling, and drilling operations in a machining center. • Flexible Manufacturing Systems (FMS) • same concept as that of the machining cell except that the elements of the FMS are machining cells rather than machining centers. Fig. 21-34 Chapter 21
Mass Production (over 200 parts/hr) • Computer-Integrated Manufacturing • CIM is a methodology and a goal; it is not a collection of equipment and software. • Its method is to integrate all aspects of design, planning, manufacturing, distribution, and management. • Its goal is to transform product designs and materials into saleable goods at a minimum cost in the shortest possible time. • CIM treats manufacturing processes and plant operations and their management as a single system, not a sequential activity. Chapter 21