Download
1 / 41
640 likes | 1.42k Views
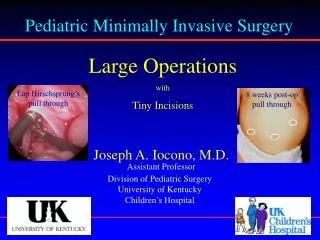
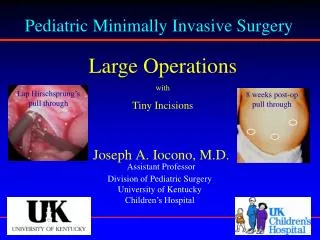
The Future of Minimally Invasive Cardiac Surgery. Marco A. Zenati, M.D. Professor of Surgery and Bioengineering University of Pittsburgh School of Medicine. Hans Jacobeus Pioneer of Thoracoscopy (Stockholm 1910). Modified Cystoscope.

E N D
The Future of Minimally Invasive Cardiac Surgery Marco A. Zenati, M.D. Professor of Surgery and Bioengineering University of Pittsburgh School of Medicine
Hans JacobeusPioneer of Thoracoscopy (Stockholm 1910) Modified Cystoscope Jacobeus HC. The Cauterization of Adhesions in Pneumothorax Treatment of Tuberculosis. Surg Gynecol Obster 1921:32:493-500 (40 patients)
Thoracic Endoscopy Pioneers in Pittsburgh1993 - Luketich Landreneau
Robotic Surgery in Pittsburgh Intuitive Surgical’s DaVinci 2004- Computer Motion’s ZEUS 1999-2002
April 5th, 2001 University of Pittsburgh Medical CenterFirst U.S. Robotic Off-Pump CABG Patient: 63 yo JAC Cardiac Surgeon: Marco A. Zenati, M.D. Day of discharge home: April 8th, 2001 POD#2
“Ideal”Minimally Invasive Surgical Procedure • Single Port • Access ANYWHERE • Local vs General Anesthesia • No need for unnecessary invasion of pleural spaces • Minimize pain NEJM 2006;354:20
HEARTLANDER The New York Times May 2007
Ganglionated Plexi Armour Anat Record 1997
Rigid Endoscope and Instrument Arm Shaft • Unable to navigate complex 3D geometry spaces (e.g. pericardial space)
RAA LAA Entry point: Subxiphoid Through Transverse Sinus
HYBRID INTERVENTIONAL SUITE Continuous EKG and hemodynamic monitoring Fluoroscopy Direct Endoscopic SVP Visualization NAVx 3D Imaging StJude Med Cardiac Surgeon Cardiac Electrophysiologist
Future Clinical “Battlefields” • Heart Failure • Ischemic Mitral Regurgitation • Prevention of Remodeling after MI • Atrial Fibrillation
Closed Chest Epicardial Ablation Pathway Ablation procedure • 8 Fr. catheter with an irrigated radiofrequency tip (Biosense Webster) • 60ºC, 40 watt, 15 seconds × several times
Subxiphoid Videopericardioscopy for CRT Lead Zenati et al. Circulation 2002
Epicardial Lead Placement for CRTwith DaVinci Robotic System