Download
1 / 9
150 likes | 361 Views
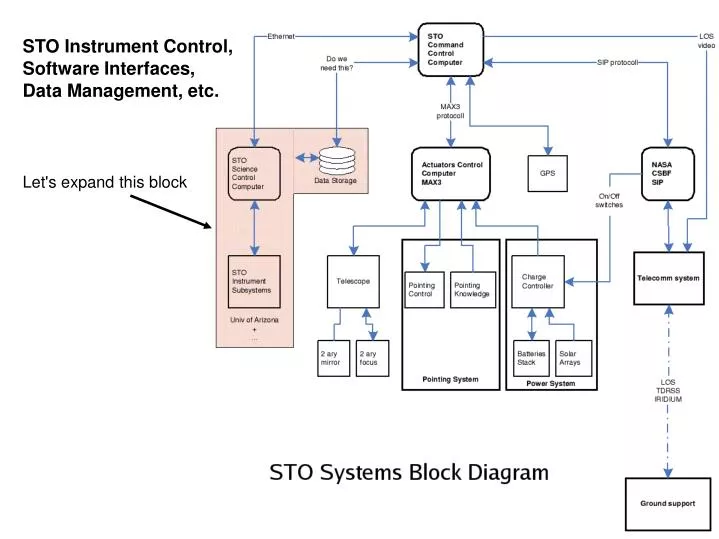
STO Instrument Control, Software Interfaces, Data Management, etc. Let's expand this block. Antarctic Mission Block Diagram. Test Flight Block Diagram. Control Computers. Embedded systems are robust and simple solutions.

E N D
STO Instrument Control, Software Interfaces, Data Management, etc. Let's expand this block
Control Computers • Embedded systems are robust and simple solutions. 4 watt, 500 MHz ARM board: SD & USB storage, programmable FPGA, ethernet, serial, digital IO, PC/104 bus (Linux and BSD) 2 watt, 200 MHz ARM board: CF & USB storage, ethernet, serial, ADC, digital I/O, PC/104 bus (Linux and BSD) CF storage available in industrial-grade up to 16 GB, SDHC to 8 GB.
Cold-booting a TS-7200 computer at a temperature of -81oC! (In the thermal chamber at UNSW, Sydney)
Potential dual-string control system One computer manages data system, the other acts as instrument controller. Careful design of digital bus generation on the digital I/O lines and ADCs allow the two ARM computers to swap roles on-the-fly if needed. Only serial subsystems are hard-wired to a specific computer; neither is particularly critical.
Instrument & Data Mgmt. System • Items to be controlled: • Receiver subsystems (mixer bias, LO, synthesizer, etc...). (RS232, DIO and I2C/SPI interfaces) • Flip mirror (interface TBD) • Spectrometer and Data system (ethernet) • Interplay of these items with “gondola systems” • data system needs TCS header (timestamp, RA/DEC, etc.) • need synchronization with telescope for OTF • data system may need to amend observing sequence based on quality of collected data
Control Software • Each hardware component has a separate TCP/IP socket server associated with it. The server listens on that socket's port for ASCII text commands to perform. • Watchdog timers allow software and hardware to be automatically reset should they become unresponsive. • Low-level server code is written in C; client code for observing programs is written in object-based higher level languages; e.g. perl, ruby or python. • Instrument and control interfaces will be performed through a standalone GUI or a web browser. • We (C. Kulesa and C. Martin) have downloaded the SBI control code/simulator from Pietro and Harry, and are learning how the STO instrument code will dovetail into the existing SBI system. • The OTF mapping scheme, modifications to the SBI scheduler, and integration of the STO data server are the principal changes.