Download
1 / 37
370 likes | 474 Views
The ‘plane space’. a ‘dual’ of the Euclidean space. Jean-Yves Bouguet 9/30/97. P. P. d. s. Historic: 3D Photography on your desk. Light source. Stick. S. Object. Shadow plane. Desk plane. P. Edge of the shadow. L s. Goal: Estimate the 3D location of P. Principle. Optical ray

E N D
The ‘plane space’ a ‘dual’ of the Euclidean space Jean-Yves Bouguet 9/30/97
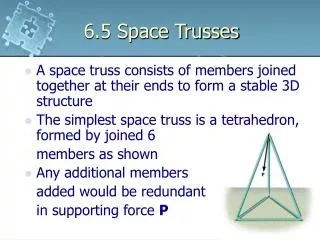
P P d s Historic: 3D Photography on your desk Light source Stick S Object Shadow plane Desk plane P Edge of the shadow Ls Goal: Estimate the 3D location of P
Principle Optical ray (Oc,xc) S Intersecting Ps with the optical ray (Oc,xc): Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
What is Ps? Optical ray (Oc,xc) S The shadow plane Ps contains S and Ls: Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
What is Ls? Optical ray (Oc,xc) S The line es is the projection of the edge Ls, or Ls is the intersection of the planes (Oc,ls) and Pd: Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
Conclusion Optical ray (Oc,xc) S Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
Preliminary observations: The key element is the shadow plane Ps Neither Ps nor Pd cross the origin Oc P s P d How do we write the math? Shadow plane ?? Ls
Definition of a plane P that does not cross the origin: Central objects: Planes P n Z P d Oc X Y normal vector distance to the origin with and Note: dot product
or: Central objects: Planes P n Z d Oc with: X Y Plane vector:
The ‘plane space’ P w w3 Z (W) Oc O w1 X Y w2 Euclidean space Plane space
Observation Pa Consider two planes Pa and Pb that intersect along the line L L Pb l Let l be the projection of L on the image plane Image plane Zc Oc Xc Yc
Observation (cont’d) Pa Parameterization: L Pb l Projected line: Image plane Zc Oc such that: Xc Yc with:
Observation (cont’d) Pa Proposition: L P Pb Proof: l Image plane Let P be a point on L Zc Oc 3D space Image plane Xc Yc
Observation (cont’d) Pa Proposition: L P Pb Proof (cont’d): l Image plane Zc Oc Xc Yc Note: dot product
Observation (cont’d) Pa L Pb w3 (W) l O w1 Image plane w2 Zc Oc Plane space Xc Yc
The dual of a line Perspective projection of L onto the image plane w3 Z Set of planes that contain the line L (W) Oc O w1 X Y w2 Euclidean space Plane space
The dual of a point P w3 Z (W) Oc O w1 X Set of planes that contain point P Y w2 Euclidean space Plane space
P s P d What about the shadow plane? Set of candidate shadow planes Where is the Shadow plane Ps? Perspective projection of Ls onto the image plane w3 Ls ? O w1 w2 (W) Need of an additional constraint!
P s P d Where is the shadow plane? (cont’d) Extra constraint: Dual of S S w3 Ls (W) O w1 w2 Shadow plane Ps:
P s P d Where is the shadow plane? (cont’d) Alternative method: Use of an extra plane Pr Projection of Lr onto the image plane Pr Lr O Ls (W) Shadow plane Ps: Note: Least squares estimate in case of noise
P P 1 2 Properties (1) L O (W) Intersecting planes
P P P P 2 1 1 2 Properties (2) Dual of the horizon line H Horizon line O (W) Parallel planes L (W) O Orthogonal planes
P P O Properties (3) P L2 L1 O Coplanar intersecting lines (W) vanishing point Horizon line V H L1 L2 (W) Parallel lines
P Properties (4) P L2 (W) L1 O Coplanar orthogonal lines (not shown)
P Properties (4) Set of orthogonal planes to P P L2 L1 O Coplanar orthogonal lines (not shown)
P Properties (4) Set of orthogonal planes to P P L2 L1 O Coplanar orthogonal lines (not shown)
P Properties (4) L3 Set of orthogonal planes to P P L2 L1 O Coplanar orthogonal lines (not shown)
P Example 1 Set of candidate ground planes Horizon line H O (W) Image plane Ground plane 1/d O d (W)
P Example 1 (cont’d) Ground plane V H (W) L2 L1 road lines O Image plane W a b Width of the road: Vanishing point
Example 2: Calibration V Horizon: Desk plane? (W) L2 L1 Grid edges O Image plane L3 L U L4 W Vanishing points
Example 2: Calibration V Set of orthogonal planes to the desk Grid edges (W) L2 L1 Grid edges O c a d Image plane b L3 L U L4 W
P s P d 3D Photography on your desk Shadow plane: S Ls 3D coordinates of P: is the plane of direction that contains
3D Photography on your desk S Ps Ls P Pd Image plane Z O X Note: Camera Y
Simple formalism Convenient for plane estimation Natural link with the perspective projection operator Vanishing points and Horizon lines are natural objects in that space Interesting features
There exists a strong similarity between this formalism and the way the Reciprocal Lattice is defined in Crystallography. Final remark Reference: “Solid State Physics” by Neil W. Ashcroft and N. David Merminl, Saunders College Publishing international Edition, Chapter 5, pp 85-94