Download
1 / 21
210 likes | 416 Views
Maximum Gain Rule for Selecting Controlled Variables Eduardo Shigueo Hori, Sigurd Skogestad Norwegian University of Science and Technology – NTNU N-7491 Trondheim, Norway. Outline. Introduction: What should we control? Self-optimizing Control Maximum Gain Rule

E N D
Maximum Gain Rule for Selecting Controlled Variables Eduardo Shigueo Hori, Sigurd Skogestad Norwegian University of Science and Technology – NTNU N-7491 Trondheim, Norway
Outline • Introduction: What should we control? • Self-optimizing Control • Maximum Gain Rule • Application: Indirect control of Distillation Column • Combination of Measurements • Conclusions
Optimal operation of Sprinter (100m) • Objective function J=T • What should we control ? • Active constraint control: • Maximum speed (”no thinking required”)
Optimal operation of Marathon runner • Objective function J=T • Unconstrained optimum • What should we control? • Any ”self-optimizing” variable c (to control at constant setpoint)? • c1 = distance to leader of race • c2 = speed • c3 = heart rate • c4 = ”pain” (lactate in muscles)
2. What is a good variable c to control? • Self-optimizing control … is when acceptable operation can be achieved using constant set points (cs)for the controlled variables c (without the need for re-optimizing when disturbances occur). • Desirable properties for a ”self-optimizing” CV (c) : - Small optimal variation (”obvious”) - Large sensitivity (large gain from u to c) (ref. Moore, 1992) - Small implementation error (”obvious”)
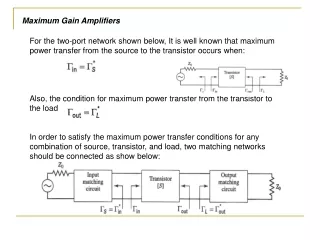
How do we find ”self-optimizing” variables in a systematic manner? • Assume cost J determined by steady-state behavior • Effective tool for screening: MAXIMUM GAIN RULE c – candidate controlled variable (CV) u – independent variable (MV) G – steady-state gain matrix (c = G u) G’ = S1 G S2 - scaled gain matrix S1 – output scaling S2 = Juu-1/2 – input ”scaling” • Maximum gain rule: Maximize • This presentation: Importance of input scaling, S2 = Juu-1/2
3. Maximum Gain Rule: Derivation cost J c = G u u uopt Halvorsen, I.J., S. Skogestad, J. Morud and V. Alstad (2003). ”Optimal selection of controlled variables”. Ind. Eng. Chem. Res. 42(14), 3273–3284.
Simplified Maximum Gain Rule Maximum Gain Rule 3. Maximum Gain Rule: Derivation (2)
3. Maximum Gain Rule: Output Scaling S1 • The outputs are scaled with respect to their ”span”:
4. Application: indirect control Disturbances Primary variables Inputs Measurements Constant setpoints Noise Selection/Combination of measurements
Column Data • Column A: - Binary mixture - 50% light component - AB = 1.5 - 41 stages (total condenser) - 1% heavy in top - 1% light in bottom
Application to distillation Disturbances:F, zF, qF Primary variables:xHtop, xLbtm Inputs: L, V Measurements: All T’s + inputs (flows) Noise (meas. Error) 0.5C on T Selection/Combination of measurements, e.g. select two temperatures
Distillation Column: Maximum Gain rule • Select two temperatures (symmetrically located) • This case: Input scaling (Juu-1/2) does not change order….
Distillation Column: Maximum Gain rule and effect of Input Scaling
5. Linear combination of Measurements • Consider temperatures only (41): Nullspace method: Possible to achive no disturbance loss : • Need as many measurements as u’s + d’s: need 4 T’s • Two-step approach (”nullspace method”): • Select measurements (4 T’s): Maximize min. singular value of 2. Calculate H-matrix that gives no disturbance loss:
5. Combination of Measurements 1. Nullspace method: Composition deviation: J=0.82 (caused by meas. error n ) Alternative approaches: 2. Same 4 T’s, but minimize for both d and n: J=0.58 3. Optimal combination of any 4 T’s: J=0.44 (branch & bound; Kariwala/Cao) 4. Optimal combination of all 41 T’s: J=0.23
6. Conclusions • Identify candidate CVs • Simplified Maximum Gain Rule, - easy to apply – Juu not needed - usually good assumption • Maximum Gain Rule: - results very close to exact local method (but not exact) - better for ill-conditioned plants