Download
1 / 12
120 likes | 233 Views
Institute for Personal Robots in Education Kickoff Meeting, September 15, 2006 Curriculum Professor Mark Guzdial Georgia Institute of Technology Professor Deepak Kumar Bryn Mawr College. Curriculum Goals. Make entry into computer science more accessible Revamp CS1 & CS2 curricula

E N D
Institute for Personal Robots in Education Kickoff Meeting, September 15, 2006 Curriculum Professor Mark Guzdial Georgia Institute of Technology Professor Deepak Kumar Bryn Mawr College Georgia Institute of Technology
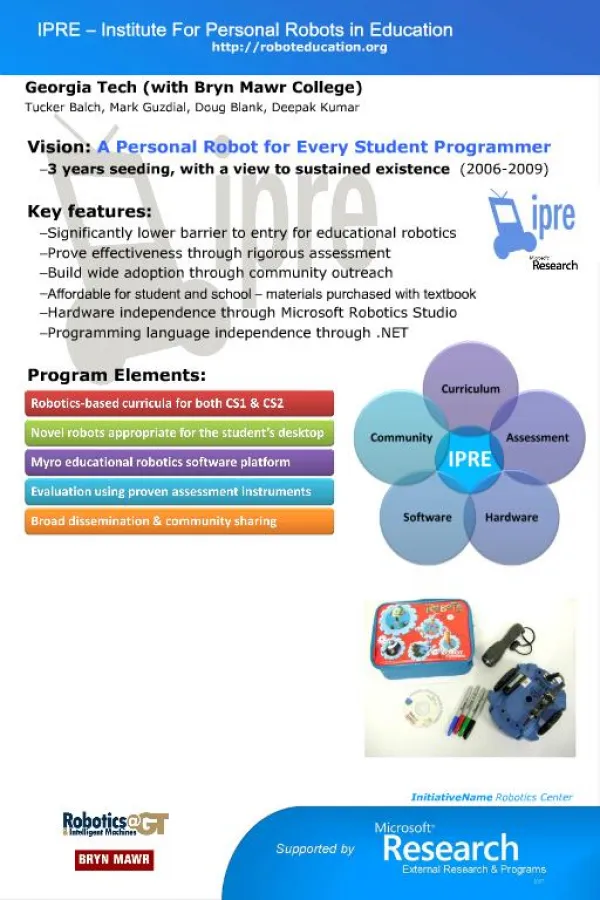
Curriculum Goals • Make entry into computer science more accessible • Revamp CS1 & CS2 curricula • Use personal robots as a “vehicle” • Fresh approach to introducing computing • Influence robot design based on past experience • Influence software development Georgia Institute of Technology
Progress to Date • Desiderata on robot features • Input on design of software environment • Collection of interesting robot behaviors/exercises • Started design of curriculum for pilot offering of CS1 in Spring 2007 Georgia Institute of Technology
Pilot CS1 in Spring 2007 • Will be offered at Bryn Mawr (Deepak Kumar) and GaTech (Mark Guzdial) • Use the Parallax Scribbler robot • Wireless bluetooth interface designed by GaTech enables Scribbler interface • Myro software running under Dr. Python (IDE) to control Scribbler • Course will provide additional data on curriculum design Georgia Institute of Technology
Curriculum Development Strategy • Step One: Figure out something that students will want to do. • Step Two: Teach the CS and Robotics to make that happen. • Goals: • Relevance • Motivation • Context for Transferrable Learning Georgia Institute of Technology
Example CS1 Exercises: Early • Focus on variables, arguments, functions, giving commands to a computer, sequencing commands • Personalize your robot (use colors, pens, stickers, etc.). Give it a personality, and a specific “move” • Then experiment with difference basic robot movement behaviors (go forward, backward, spin, turn, etc.) and learn how to upload and play a tune. Design a series of steps for your robot to perform a dance while playing a tune. • Test the sensitivity and range of IR sensors for light detection, obstacle detection. The latter will vary depending on the reflectance of the object being sensed... • Put these results in Excel to introduce ideas of computational science: Gathering data from sensors and analyzing it. Georgia Institute of Technology
Example CS1 Exercises: Later • Iteration • Focus on iterating, sequencing within an iteration, limiting iteration • Experiment with simple behaviors like going forward for a while and then backward. Repeat these behaviors several times. Does the robot track the same space or are the movements shifting its space? A good way to test these would be to insert a pen and let the robot draw its path each time. This will help observe and get used to variations in your robots motor behaviors. • Write a loop to input a sound (could be on laptop instead of robot) then play it back. Do this in a group of robots. Make a sound, allowing the group behavior and dynamics to create a cacophony. • Write programs for the robot to draw a square, a circle, a figure-8, a 5 point star...and other shapes...a spiral? Georgia Institute of Technology
Example CS1 Exercises: Powerful • Representation and Interpretation • Using some other data structure or sensed data as a command to drive other behavior • Create a file with commands like "left on 30 \n right on 30 \n beep" Write a program to read these commands and execute them – in other words, define a mini robot language and write an interpreter for it. Gives us the opportunity to address string processing, a typical CS1 topic. • Have one robot "call out" audio commands (perhaps specific tones, via the speaker), and have other robots "hear" the commands (via microphones) and execute the commands. • Follow a line of symbols/fiducials, where the symbols (colors or scan codes) can be interpreted as music. Start the robot on the line, and as it encounters the markings, it plays a note. The spacing is the timing of the songs. Put one after another, and they play in a round. Have two go together (on two lines) and they play a harmony. The robot could also write the music with a pen. First robot writes the song, second robot plays it. Georgia Institute of Technology
Parallax Scribbler Robot • Low cost ($80) and features • 3 photosensors • IR sensors in front • IR on chasis • Servo controlled motors • 3 Programmable LEDs • Speaker • Battery operated (6 AAs) • Serial interface Georgia Institute of Technology
Two Year Schedule • December 2006: Meeting with IPRE Associates • Spring 2007: Initial CS1 Trial at BM and GT. • Summer 2007: Workshops with Robotics Component • Fall 2007: Develop CS2, iterate trial CS1 • Spring 2008: Trial CS2, broadscale CS1 • Summer 2008: Robotics Workshop Georgia Institute of Technology
Assessment Methods • Within term: • Initial, midterm, final surveys. • Focus group or individual student interviews. • Across term: • Tracking – do they stay in CS?How well do they do? Georgia Institute of Technology
Next Steps: Start Building • We need the software and hardware infrastructure to be ready to start implementing these projects ourselves. • Then we can backtrack to define the CS and Robotics concepts to teach. • Then we can lay out lectures, assignments, labs => curriculum. Georgia Institute of Technology