Download
1 / 23
360 likes | 1.33k Views
Motion Segmentation. CAGD&CG Seminar Wanqiang Shen 2008-04-09. Application. Initialization. Motion detection. Motion tracing. Pose estimation. Recognition. Motion analysis. Motion segmentation. Accurate Robust Fast. projections. Motion segmentation. clusters. Problem. How much.

E N D
Motion Segmentation CAGD&CG Seminar Wanqiang Shen 2008-04-09
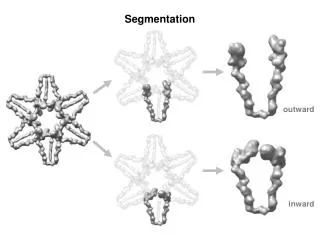
Initialization Motion detection Motion tracing Pose estimation Recognition Motion analysis Motion segmentation
Accurate Robust Fast projections Motion segmentation clusters Problem How much What How
A rigid-body motion Traditional model • Multiple rigid-body motions
Paper [1] R. Vidal, Y. Ma, and S. Sastry. Generalized Principal Component Analysis (GPCA). IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(12):1–15, 2005. [2] J. Yan and M. Pollefeys. A general framework for motion segmentation: Independent, articulated, rigid, non-rigid, degenerate and non-degenerate. In European Conference on Computer Vision, pages 94–106, 2006. [3] R. Tron and R. Vidal: A Benchmark for the Comparison of 3-D Motion Segmentation Algorithms. IEEE International Conference on Computer Vision and Pattern Recognition, 2007.
[1] GPCA Estimating n Estimating subspaces Optimizing & clustering Model
[1] Estimating subspaces • calculating normalized C • Factorization • Solving for the last 2 entries of each bi • Solving for the first K-2 entries of each bi
[1] Remarks • Advantages • Algebraic algorithm • Dealing with both independent and dependent motions • disadvantages • Deteriorating as n increases • C is sensitive to outliers
[2] LSA clustering projection SVD local subspace estimation
[2] Local subspace estimation Affinity matrix
[2] Clustering • Estimation N • While Numofclusters< N • Compute affinity matrix for each clusters • Divide each cluster into two clusters • Evaluate the best subdivision
[2] Remarks • Advantages • Outliers are likely to be “rejected” • Need less point trajectories • disadvantages • Neighbors of a point belong to different subspace • The select neighbors may not span the underlying subspace
[3] test samples checkerboard traffic articulated
[3] comparing data • Two groups • Three groups