Download
1 / 1
10 likes | 212 Views
AR Drone Team Team Members: Manish Pati , Jose Jurado , Luke Walsh, Jack Hammons, Steven Bogenshutz Instructors: Prof. Samuel Midkiff and Prof Charles Bouman Purdue University School of Electrical and Computer Engineering.

E N D
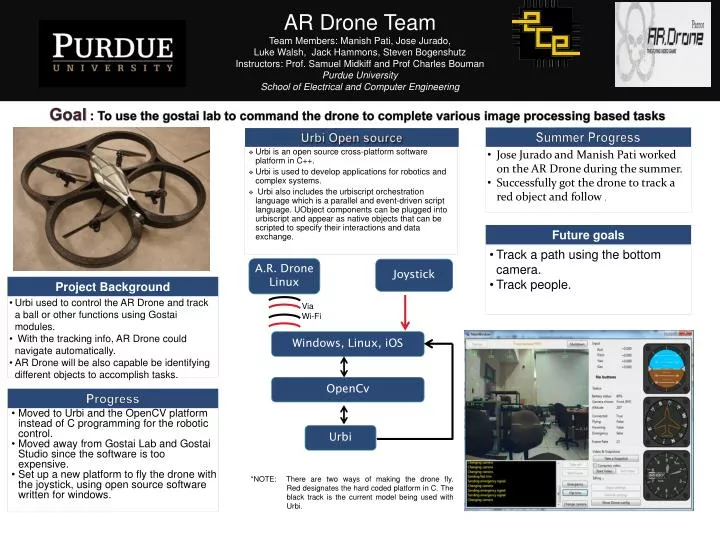
AR Drone TeamTeam Members: Manish Pati, Jose Jurado, Luke Walsh, Jack Hammons, Steven BogenshutzInstructors:Prof. Samuel Midkiff and Prof Charles BoumanPurdue UniversitySchool of Electrical and Computer Engineering • Goal : To use the gostai lab to command the drone to complete various image processing based tasks Summer Progress Urbi Open source • Urbi is an open source cross-platform software platform in C++. • Urbi is used to develop applications for robotics and complex systems. • Urbi also includes the urbiscript orchestration language which is a parallel and event-driven script language. UObject components can be plugged into urbiscript and appear as native objects that can be scripted to specify their interactions and data exchange. • Jose Jurado and Manish Pati worked on the AR Drone during the summer. • Successfully got the drone to track a red object and follow . Future goals • Track a path using the bottom camera. • Track people. A.R. Drone Linux Joystick ProjectBackground • Urbiused to control the AR Drone and track a ball or other functions using Gostai modules. • With the tracking info, AR Drone could navigate automatically. • AR Drone will be also capable be identifying different objects to accomplish tasks. Via Wi-Fi Windows, Linux, iOS OpenCv Progress • Moved to Urbi and the OpenCV platform instead of C programming for the robotic control. • Moved away from Gostai Lab and Gostai Studio since the software is too expensive. • Set up a new platform to fly the drone with the joystick, using open source software written for windows. Urbi *NOTE: There are two ways of making the drone fly. Red designates the hard coded platform in C. The black track is the current model being used with Urbi.