Download
1 / 61

E N D
1. PENDAHULUAN Osiloskopsinarkatoda(cathode ray oscilloscope, selanjutnyadisebut CRO) adalahinstrumenlaboratorkm yang sangatbermanfaatdanterandalkan yang digunakanuntukpengukurandananalisabentuk-bentukgelombangdangejala lain dalamrangkaian-rangkaianelektronik. Padadasarnya CRO adalahalatpembuatgrafikataugambar (plotter) X-Y yang sangatcepat yang memperagakansebuahsinyalmasukanterhadapsinyal lain atauterhadapwaktu. Pena ("stylus") plotter iniadalahsebuahbintikcahaya yang bergerakmelaluipeimukaanlayardalammemberitanggapanterhadaptegangan-teganganmasukan.
Di sampingtegangan, CRO dapatmenyajikangambaran visual dariberbagaifonemenadinamikmelaluipemakaian transducer yang mengubaharus, tekanan, tegangan, temperatur, percepatan, danbanyakbesaranfisislainnyamenjaditegangan. CRO digunakanuntukmenyelidikibentukgelombang, peristiwatransiendanbesaranlainnya yang berubahterhadapwaktudarifrekuensi yang sangatrendahkefrekuensi yang sangattinggi. Pencatatankejadianinidapatdflakukanolehkamerakhusus yang ditempelkanke CRO gunapenafsirankuantitatif.
2. OPERASI DASAR CRO Subsistent utamadarisebuah CRO untukpemakaianumumditunjukkanpada diagram balok yang disederhanakanpadaGambar 9-1. Terdiridari: Tabungsinarkatoda (Catholi, ray tube) atau CRT. Penguatvertikal (vertical amplifier), Salurantunda (delay line). Generator basis waktu (time base generator Penguathorisontal (horizontal amplifier). Rangkaianpemicu (trigger circuit). Sumberdaya (power supply).
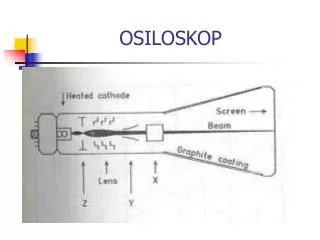
Bagian - bagaian CRO keseluruhantelahdisebutdiatasdenganmasingmasingfungsisecaraurutanprosesadalah: 1. Tabungsinarkathoda (CRT), CRT ini yang menghasilkansuatuberkas electron yang dipusatkansecaratajamdandipercepatkesuatukecepatan yang sangattinggi. Berkas yang sangatcepatinibergerakdarisumbernya (senapan electron, electron Gun) kedepan CRT, dimanasinar electron tersebutakanmembentukbahanfluorosensi yang melekatdipermukaan CRT (layar) bagiandalamdenganenergi yang cukupuntukmembuat layer bercahayadalamsebuahbintikkecil. Padasaatmerambatke layer berkas electron lewatantarasepasang flat defleksivertikaldansepasang flat defleksi horizontal.
2. Penguat vertikal, Penguat vertikal ini untuk mengatur pelemahan masukan (input attenuator) yang telah dikalibrasi (besaran volt/DIV). tegangan yang dimasukkan ke flat defeksi vertical dapat menggerakkan berkas electron pada bidang vertical sehingga bintik CRT dapat bergerak ke atas dan kebawah. 3. Saluran tunda, Proses sinyal yang melewati beberapa blok akan mengalmi penunaan waktu sekitar 80 ns total. Pada defleksi horizontal dan vertical memiliki blok rangkian pengendali yang berbeda sehingga ada penyapuan yang berbeda antara keduanya. 4. Generator basis waktu, Sering disebut generator penyapu (sweep generator) berfungsi untuk membangkitkan sebuah gelombang gigi gergaji yang digunakan sebagai defleksi horizontal dalam CRT.
5. Penguat HorisontalPenguat Horisontal berisi pembalik fasa (phase inverter) yang akan menghasilkan dua gelombang keluaran simultan yaitu: gigi gergaji yang menuju positif (menaik) dan gigi gergaji yang menuju negatif (menurun). Gigi gergaji yang menuju positif akan dimasukkan ke plat defleksi horizontal sebelah kanan, sedangkan gigi gergaji yang menuju negative ke flat defleksi sebelah kiri. Teganagn - tegangan ini akan menyebabkan berkas electron menyapu sepanjang layer CRT dari kiri ke kann, dalam satuan waktu yang dikontrol oleh time/DIV.
6. Rangkaian Pemicu (trigger circuit)Menghasilkan satu pulsa pemicu dari satu titik yang dipilih pada gelombang masukan yang akan digunakan untuk menghidupkan Generator Basis waktu yang gilirannya memulai penyapuan bintik CRT secara horizontal dari kiri ke kanan. 7. Sumber daya Listrik (power suply)terdiri dari bagian tegangan tinggi untuk mengoprasikan CRT dan tegangan rendah untuk mencatu rangkaian - rangkaian elektronik osiloskop.
3. TABUNG SINAR KATODA (CRT) Operasi CRT Strukturbagiandalamsebuahtabungsinarkatoda (Cathode ray tube) atau CRT ditunjukkan pads Gambar 9-3. Komponenutamadari CRT untukpemakaianumuminiadalah : Perlengkapansenapanelektron. Perlengkapanpelatdefleksi. Layer tluoresensi. Tabung gelas dan dasar tabung.
Dalamskema CRT padaGambar 9-3, elektron-elektrondipancarkandarisebuahkatodatermionik yang dipanaskansecaratidaklangsung. Katodainisecarakeseluruhandikelilingiolehsebuahkisipengatur(control grid) yang terdiridarisebuahsilindernikeldenganlobangkecilditengahnya, satusumbu(koaksial) dengansumbutabung (silinder). Elektron-elektron yang mengatur agar lewatmelaluilobangkecildidalamkisitersebutsecarabersama-samamembentuk yang disebutarusberkas (beam current). Besarnyaarusberkasinidapatdiaturmelaluialatkontroldi panel depan yang diberitandaINTENSITY, yang mengubahtegangannegatif (bias) kisipengaturdiacuterhadapkatoda. Kenaikantegangannegatifkisipengaturmenurunkanarusberkas, danberartimenurunkanintensitas (terangnya) bayangan CRT; denganpenurunantegangannegatifkisimemperbesararusberkas. Kejadianinjidentikdengankisipengaturdidalamsebuah, tabunghampatrioda yang biasa.
Pemusatanelektrostatik Pemusatanelektrostatik(electrostatic focusing) digunakandalamsemua CRO. Untukmemahamibekerjanyametodapemusatanelektrostatik, sangatbermanfaatuntukpetama-tama memperhatikankelakukandarimasing-masingpartikeldidalamsebuahmedanlistrik. Perhatikan diagram Gambar 9-5 yang menunjukkansebuahelektronhipotesisdalamkeadaandiamdidalamsebuah Medan magnit. Definisiintensitasmedanlistrikmenyatakanbahwagayapadasatu-satuanmuatanpositifpadasetiaptitikdidalamsebuahmedanlistrikadalahintensitasmedanlistrikpadatitiktersebut. Dengandemikian, menurutdefinisi
dimana ℮ = intensitasmedanlistrik, dalam V/m. f = gayapadamuatan, dalam N. q = muatan, dalam C. Sebuahelektronadalahsebuahpartikelbermuatannegatifdanmuatannyaadalah e = 1,602 x 10-19 C
Gambar 5.Bagian - bagian pemusat elektrostatis Panjang titik api dari system lensa - lensa cekung ini dapat diperbesar atau diperkecil dengan mengubah tegangan pada anosa pemusat, sehingga titik api berkas berubah sepanjang sumbu CRT. Potensiometer yang melengkapi pengaturan tegangan pada anoda pemusat terdapat panel depan CRo yang diberi tanda FOCUS.
C. DefleksiElektrostatisGaya f yang bekerjapadasebauh electron dalammedanlistrikseragamsepertipadagambar 4.1. denganpersamaangaya f = m.a Gambar 6. Gaya f yang bekerja pada sebuah electron di dalam medan listrik yang seragam.
Defleksi pada Layar FlouresensePenyimpangan yang terjadi pada 2 flat defleksi ditempatkan sejauh d dihubungkan pada sebuah sumber potensial Ed sehingga ada medan listrik E intensitas yang medan magnet berikan. Gambar sebuah lintasan electron yang bergerak dalam sebuah muatan listrik seragam sesuai Gambar 7:
Dengan memasukkan persamaan gaya maka didapat persamaan kecepatan:
ContohSoal: Teganganpemercepatsebuah CRT adalah 1000 V. Sebuahtegangan sinus dimasukkankesepasangpelatdefleksi yang panjangaksialnyaadalah 1 cm. Tentukandefleksipadalayarflouresensi?JikapadaCRTjarakdari plat defleksikelayar 4 cm dantegangandefleksisebesar 2000V.
4. SISTEM DEFLEKSI VERTIKAL 4.1 Elemen-elemen Dasar Sistem defleksi vertikal biasanya terdiri dari elemen-elemen yang ditunjukkan pada gambar diagram blok berikut :a. Jarum penduga CRO (probe)b. Pemilih masukan (input selektor)c. Pelemah masukan (input attenuator)d. Penguat vertikal Gambar 2.8 Diagram blok fungsional dari sistem defleksi vertikal
4.2 Jarum PendugaJarum penduga CRO (CRO probe) melakukan fungsi penting yaitu menghubungkan penguat vertikal ke rangkaian yang diukur tanpa membebani atau tidak mengganggu rangkaian. Untuk pemakaian umum jarum penduga terdiri dari :- tahanan seri (pelemah sinyal)- kapasitor shunt variabel (kompensasi jarum penduga)
4.3 Pemilih MasukanPenempatan pemilih masukan ke posisi ac secara kapasitif akan menggandengkan tegangan sinyal ke pelemah (attenuator). Kapasitor akan menahan komponen dc dari gelombang masuk dan hanya melewatkan gelombang ac memasuki penguat. Berguna untuk mengukur tegangan sinyal ac yang bergabung dengan tegangan catu dc atau sumber tegangan.Penempatan pemilih masukan ke posisi dc menghubungkan nilai tegangan sesaat total sambungan tanah pada pemilih masukan yang terdapat pada beberapa CRO sebagai posisi tengah antara ac dan dc.
Pelemah masukan (input attenuator)Pelemah masukan terdiri atas sejumlah pembagi tegangan RC yang dikontrol melalui panel depan CRO oleh pemilih VOLT/DIV. Pelemah masukan sinyal harus tidak terpengaruh oleh frekuensi dan ini memerlukan pelemah yang terkompensasi. Dalam pelemah yang terkompensir impedansinya dipertahankan konstan tidak tergantung pada frekuensi tegangan sinyal dengan mengatur Ca sedemikian konstanta Ra.Ca sama dengan konstanta Rt.Ct.
Pelemah masukan dinyatakan sebagai rangkaian jembatan pada kesetimbangan, cabang XY dapat diambil dari rangkaian dan apabila Ra.Ca = Ri.Ci Sehingga didapat Gambar 10. Gambar 10 Pelemah masukan dinyatakan sebagai rangkaian jembatan Secara praktis untuk menyetimbangkan jembatan dan mengkompensir pelemah masukan adalah memasukkan sinyal uji berbentuk gelombang persegi (pengkalibrasi) ke masukan pelemah dan mengatur Ca sehingga tegangan keluaran yang diamati pada layaradalah tiruan persis dari sinyal masukan.
4.4 Penguat VertikalPenguat vertikal terdiri dari beberapa tingkatan dengan sensitivitas atau penguatan total yang tetap, biasanya dinyatakan dalam faktor defleksi (V/Div). Penguat vertikal dipertahankan dalam batas kemampuannya untuk menangani sinyal berdasarkan pemilihan pelemah masukan (input attenuator) yang sesuai. Dengan membuat pelemah yang paling sensitif, penguatan total dari penguat berhubungan dengan pembacaan terendah dari sakelar selektor V/Div.
5. Saluran Tunda (Delay Line)Semua rangkaian elektronik di dalam CRO menyebabkan keterlambatan waktu tertentu di dalam transmisi tegangan sinyal ke plat-plat defleksi. Pengolahan sinyal dalam saluran horisontal mencakup pembangkitan dan pembentukan sebuah pulsa pemicu yang menghidupkan generator penyapu, yang keluarannya dikembalikan ke penguat horisontal dan kemudian ke plat-plat defleksi horisontal. Keseluruhan proses ini membutuhkan waktu dalam orde 80 ns atau sekitarnya.Saluran tunda sebesar 200 ns ditambahkan ke saluran vertikal dan penyapuan horisontal dimulai sebelum defleksi vertikal . Pemicuan harus mendahului saluran tunda.
Gambar 12. Keterlambatan sinyal vertikal memungkinkan penyapuan horisontal dimulai sebelum defleksi vertikal.
6. Sistem Defleksi Horisontal Defleksi horisontal memerlukan tegangan penyapuan yang bentukknya adalah linier. Penyapuan men scan layar atau menyapu sinyal masukan.Tegangan penyapu atau basis waktu ini di hasilkan dalam sistem defleksi horisontal CRO oleh generator penyapu. Tegangan penyapu yang ideal adalah yang linier bertambah dengan kecepatan konstan dari suatu nilai minimal ke nilai maksimal tertentu dan kemudian turun dengan cepat ke level semula.
Suatu generator penyapu merupakan gabungan dari rangkaian pengisi dasar RC yang ditunjukkan gambar dibawah. Dihasilkan sinyal yang tidak linier. Kenaikan tegangan sangat tidak linier : ec mencapai 63 persen nilai akhirnya dalam suatu konstanta waktu dan mencapai nilai penuh dalam 5 kali. Jelas bahwa ec tidak dapat digunakan sebagai tegangan penyapu linier. Dalam rangkaian penyapu RC yang praktis fungsi saklar S diganti oleh alat penghubung saklar elektronik.
ContohSoal : Bagaimanacaramembangkitkangelombang yang diumpankanpada plat depleksi horizontal padaosiloskop ? jawab: Defleksihorisontalmemerlukanteganganpenyapuan yang bentukknyaadalah linier. Penyapuan men scan layarataumenyapusinyalmasukan. Teganganpenyapuatau basis waktuinidihasilkandalamsistemdefleksihorisontal CRO oleh generator penyapu. Teganganpenyapu yang ideal adalah yang linier bertambahdengankecepatankonstandarisuatunilai minimal kenilaimaksimaltertentudankemudianturundengancepatke level semula. Suatu generator penyapumerupakangabungandarirangkaianpengisidasar RC yang ditunjukkangambardibawah. Dihasilkansinyal yang tidak linier. Kenaikantegangansangattidak linier.
6.1 Sinkronisasi penyapuanDalam osilator relaksasi yang ditunjukkan gambar dibawah sinkronisasi penyapuan dapat diperoleh dengan memasukkan yang disebut sinkronisasi (sync signal) ke terminal masukan sync sedemikian sehingga memperkecil tegangan puncak UJT. Gambar yang lain menunjukkan sederetan pulsa sinkronisasi negatif ditindih diatas tegangan puncak UJT. Gambar 14 Sinyal masukan vertikal dan penyapuan kontinyu
Sinyal sinkronisasi gelombang sinus juga dapat memperpendek atau memperpanjang periode yang biasa dari gigi gergaji.ini ditunjukan pada gambar 16 dimana dua tegangan panyapuan dari frekuensi yang berbeda disinkronksn kesinyal sinkronisasi gelombang sinus yang sama .satu gelombang gigi gergaji ( digambatkan sebagai garis tebal ),yang periodenya yang biasa lebih pendek dari periode sinyal sinkronisasi,diperpanjang sampai dia sejalan dengan gelombang sinus.gelombang gigi gergaji yang lain (digambarkan sebagai garis putus-putus ),yang periodenya yang biasa lebih panjang dari periode sinyal sinkronisasi,diperpendek hingga dia sinkron dengan gelombang sinus sebelumnya,dalam kedua halini penyapuan yang telah disinkronkan menggunakan frekuensi sinyal sinkronisasi
Sebuah sinyal sinkronisasi berbentuk sinus dapat digunakan untuk menyinkronkan tegangan-tegangan panyapu yang periode pribadinya lebih lama atau lebih pendek dari periode sinyal penyelaras (sinkronisasi ) Dalam Gambar 17 pemilih ini ditunjukkan sebagai sebuah saklar tiga posisi yang diberi tanda INT-EXT-LINE .Pada posisi internal atau INT, digunakan sebuah sample sinyal penguat vertical yang dilengkapi dengan sebuah pembagi tegangan untuk membangkitkan pulsa sinkronisasi.,
Gambar. 2.17 Rangkaian pemilih sinkronisasi. 6.2 Penyapuan terpicu ( Triggered sweep ) CRO jenis laboratorium biasanya dilengkapi dengan system basis waktu yang menggunakan apa yang disebut penyapuan terpicu (triggered sweep ).Dengan penyapuan terpicu ini generator gigi gergaji tidak membangkitkan suatu tegangan tanjak kecuali kalau diminta untuk melakukannya oleh sebuah pulsa pemicu.
Gambar 18 (a) menunjukkan modifikasi sebuah osilator rileksasi sebagai contoh praktis dari rangkaian penyapuan yang terpicu.Kedua tahanan R3 dan R4 membentuk sebuah pembagi tegangan melewati tegangan suplay VBB. Tahanan-tahanan dipilih sedemikian sehingga tegangan VD pada katoda dari dioda D berada dibawah tegangan puncak Vp untuk menghidupkan
Diagram balok pada gambar 20 menunjukan sebuah rangkaian pemicu yang kahas bagi CRO dengan penyapu terpicu.rangkaian pemicu menerima sinyal masukkan dari bentuk dan amplitudo yang berlainan, dan dari berbagai sumber, dan mengubahnya menjadi pulsa-pulsa yang amplitidonya seragam untuk operasi penyapuan yang terpercaya . Gambar 2.19 Diagram balok dari sebuah rangkaian pemicu penyapuan
6.3 PerbaikanlinearitaspenyapuanOsilator-Osilatorlaboratoriumdirancanguntukmelakukanpengukuran yang telititerhadapwaktudankarenaitumemerlukanpenyapuandenganlinieritaspenyapuan, diantaranya yang terpentingadalah :a) Aruspengisian yang konstan, dengancaramanakapasitorpengaturwaktudimuatisecaraliniertiasdarisumberarus yang konstan.b) Rangkaianpenyapu Miller, dengancaramanasubuahmasukkantenaga (Step input ) diubahmenjadisebuahfungsitanjak linier denganmenggunakan integrator operational.
c) Rangkaian "Phantastron" yang merupakan variasi dari rangkaian millerd) Rangkaian bootstrap,dengan cara mana arus pengisian yang konstan dapat dipelihara yakni dengan mempertahankan tegangan pada tahanan pengisi, dan dengan demikian, arus pengisian yang malaluinya adalah konstane) Rangkaian kompensasi, yang digunakan untuk memperbaiki linieritas rangkaian Miller dan Rangkaian bootstrap
6.4 Penguat HorisontalDalam sebuah CRO yang biasa tingkat persyaratan prestasi (Penguatan/lebar bidang ) penguat horizontal lebih randah dari penguat vertical. Sementara penguat vertical harus mampu mengenai sinyal-sinyal beramplitudo kecil dengan kenaikan waktu yang cepat, penguat horizontal hanya harus memproses sinyal penyapu yang amplitudonya cukup tinggi dan kenaikan waktunya relatif lambat..akan tetapi penguatan horizontal lebih besar dari penguat vertical.sebab sensitivitas defleksi horizontal CRT lebih kecil dari sensitivitas defleksi vertikal.
7. JarumPenduga CRO Jarum penduga (Probe) CRO melakukan fungsi penting yaitu menghubungkan rangkaian yang akan diselidiki ke terminal-teminal masukkan CRO tanpa membebani atau jika tidak mennganggu susunan pengujian.Agar memenuhi persyaratan dari berbagai CRO pemakaian umum dan pemakaian khusus, terdapat berbagai jenis jarum penduga dari jenis tegangan pasif yang sederhana sampai ke jarum penduga, dari jenis tegangan pasif yang sederhana sampai kejarum penduga aktif yang baik untuk pemakaian khusus. Gambar 21. Diagram balok yang umum untuk sebuah penduga CRO
7.1 Jarumpendugateganganpasif (passive probe ) Jarumpenduga yang paling terkenaldanmengenyangkanuntukmengandengkansinyal yang akandiselidikike CRO adalahjarumpendugateganganpasif ( disebutdemikiansebabtidakmengandungelemen-elemenaktif )Padagambar 22, kepalajarumpendugaberisitahananpelemah R1, yang diparaleloelhsebuahkapasitorkecil C1 untukkompensasijarumpenduga .sebuahkabelkoaksialmenghubungkankepalajaeumpendugake CRO yang impedansimasukannyadinyatakanolehtahananRinpararelterhadapkapasitor