Download
1 / 16
170 likes | 384 Views
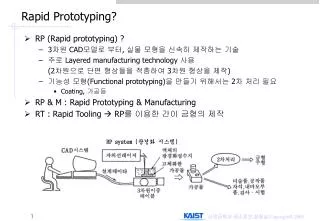
Darko Hercog. DSP-2 Rapid Control Prototyping Systems TARET project Villach, February 2007. DSP-2 rapid control prototyping overview. MATLAB/Simulink/RTW. DSP - 2 learning module. C code. TI Code Composer. Binary code. DSP Terminal. Program download. RS-232.

E N D
Darko Hercog DSP-2 Rapid Control Prototyping SystemsTARET projectVillach, February 2007
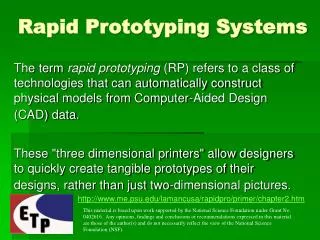
DSP-2 rapid control prototyping overview MATLAB/Simulink/RTW DSP-2 learning module C code TI Code Composer Binary code DSP Terminal Program download RS-232 Online signal monitoring and parameter tuning Darko Hercog
DSP-2 rapid control prototyping overview Darko Hercog
DSP-2 Controller INC. ENC. • Signal processor TI TMS320C32-60MHz • Xilinx FPGA of Spartan family • SRAM 128Kx32 • FLASH ROM 256Kx8 – 70ns • 4x12 bit A/D converter • 1x unipolar input • 2x bipolar input • 1x bipolar multiplexed input (8/1) • 2x12 bit D/A converter • CAN controller • 3x optical isolated logical input • 1x optical isolated logical output • RS-232 connection with the PC • RS-485 interface for incremental encoder • 3 phase pulse width modulator (PWM) • etc. ‘C32 SRAM RS 232 OPTO I/O FLASH Xilinx CAN INVERTER A/D A/D D/A Darko Hercog
DSP-2 Library for Simulink DSP-2 library contains set of blocks that enables easy programming of DSP-2 control systems using Simulink Darko Hercog
DSP-2 device driver blockset DSP-2 device driver blockset subsystemcontains over 20 DSP-2 blocks: • Analog input/output • Digital input/output • CAN Read/Write • From/To memory • From/To Terminal • Incremental encoder (position, speed) • To file • Modulator • PWM • PRBS • Transformations: • dq -> ab • ab -> dq • rad/s -> RPM • RPM -> rad/s Darko Hercog
Example – speed control of the AC motor Darko Hercog
Initialization of DSP Terminal GUI DSP Terminal Simulink model Darko Hercog
DSP Terminal • DSP Terminal enables on-the-fly: • data visualization • parameter tuning • GUI of DSP Terminal is automatically created (depends on block used in Simulink model) Darko Hercog
DSP-2 learning module DSP-2 controller DSP-2 I/O connector • Plants: • 1., 2. or 3. order system • H-bridge for DC motor • Buck converter Darko Hercog
DSP-2 learning module with DC motor H- bridge DC motor Darko Hercog
DC motor position control Target independent subsystem Target dependent subsystem Darko Hercog
DSP-2 learning module with custom plant Darko Hercog
DSP-2 Robotic Controller DSP-2 Robotic Controller (DSP-2 RC) is composed of DSP-2 controller and additional robotic board. DSP-2 RC contains the following peripheral: • 4 x interfaces for incremental encoders • 4 x 12 bit A/D converter (±10 V) • 4 x 12 bit D/A converter (±10 V) • 8 x digital inputs • 16 x digital outputs • CAN • USB • Ethernet Darko Hercog
DSP-2 robotic controller blockset DSP-2 robotic controller device driver blockset contains the following blocks: • Analog Inputs/Outputs • Digital Inputs/Outputs • Encoder position and speed measurement • Position preset • CAN Read/Write Darko Hercog
DSP-2 learning module with DC motor H- bridge DC motor Darko Hercog