Download

1 / 22
220 likes | 397 Views
Measurement And Control Of Slip In a Continuously Variable Transmission. B. Bonsen, T.W.G.L. Klaassen, K.G.O. van de Meerakker M. Steinbuch, P.A. Veenhuizen. CVT. Infinite number of ratios within a range Shifting while engaged Optimal use of IC engine. CVT. Slip. Friction drive

E N D
Measurement And Control Of Slip In a Continuously Variable Transmission B. Bonsen, T.W.G.L. Klaassen, K.G.O. van de Meerakker M. Steinbuch, P.A. Veenhuizen
CVT • Infinite number of ratios within a range • Shifting while engaged • Optimal use of IC engine
Slip • Friction drive • Slip between belt and pulley • Wear • Clamping force
Efficiency • Actuation losses • Friction in Belt • Bearing losses • Lubrication
Project goals • Optimize CVT transmission efficiency by: • using alternative actuation system • lowering clamping force
Lowering clamping force • Advantage: • Less friction losses in the belt • Less actuation power • Less friction in the bearings • More torque on the wheels • Disadvantage: • Increased risk of damage due to slip
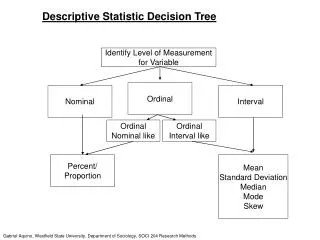
Measurement of slip • Definition of slip • Measurement of • Calculation of
Control • Clamping force • Ratio • Speed
T d p + F r e f s r - g Slip feedback
Clamping force • Safety • Actuation bandwidth • Slip measurement
Conclusions • Stable control of slip • Robustness for torque peaks up to 30Nm • Lower clamping force (-30%) • Higher variator efficiency (+4%)