Download
1 / 5
60 likes | 826 Views
Introduction. A. V t BA. V t AO 2. A. B. ω 2. O V. V s BO 4. O 2. B. Velocity Polygon for a Crank-Slider Mechanism

E N D
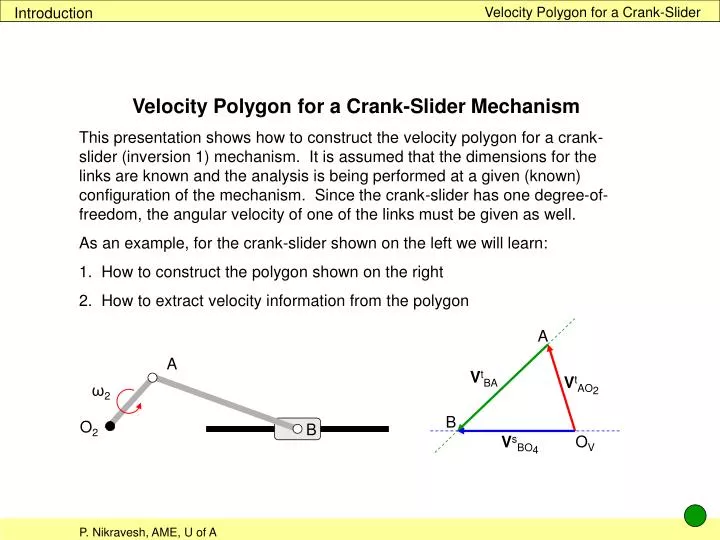
Introduction Velocity Polygon for a Crank-Slider A VtBA VtAO2 A B ω2 OV VsBO4 O2 B Velocity Polygon for a Crank-Slider Mechanism This presentation shows how to construct the velocity polygon for a crank-slider (inversion 1) mechanism. It is assumed that the dimensions for the links are known and the analysis is being performed at a given (known) configuration of the mechanism. Since the crank-slider has one degree-of-freedom, the angular velocity of one of the links must be given as well. As an example, for the crank-slider shown on the left we will learn: How to construct the polygon shown on the right How to extract velocity information from the polygon
Inversion 1 Velocity Polygon for a Crank-Slider ω2 A O2 B A ω2 O2 B Inversion 1 Whether the crank-slider is offset or not, the process of constructing a velocity polygon remains the same. Therefore, in the first example we consider the more general case; I.e., an offset crank-slider. As for any other system, it is assumed that all the lengths are known and the system is being analyzed at a given configuration. Furthermore, it is assumed that the angular velocity of the crank is given.
Vector loop Velocity Polygon for a Crank-Slider We define four position vectors to obtain a vector loop equation: RAO2 + RBA = RO4O2 + RBO4 Time derivative: VAO2 + VBA = VO4O2 + VBO4 Since RO4O2 is fixed to the ground, VO4O2 = 0. The lengths of RAO2 and RBA are constants, therefore VAO2 and VBA are tangential velocities. The axis of RBO4 is fixed, but its length varies. Therefore VBO4 consists only of a component parallel to RBO4 which is a slip velocity. A ω2 ► O2 RAO2 RBA RO4O2 B O4 RBO4 The velocity equation can then be expressed as: VtAO2 + VtBA = VsBO4
Determine velocities Velocity Polygon for a Crank-Slider VtAO2 VtAO2 + VtBA = VsBO4 We calculate VtAO2: VtAO2 = ω2∙ RAO2 The direction is found by rotating RAO2 90° in the direction of ω2: The direction of VtBA is perpendicular to RBA The direction of VsBO4 is parallel to RBO4 We draw the velocity polygon: VtAO2 is added to the origin VtBA starts at A VsBO4 starts at the origin The two lines intersect at B. We add the missing velocities: This polygon represents the velocity loop equation shown above! A ω2 O2 RAO2 RBA ► RO4O2 B ► O4 RBO4 ► A ► VtBA ► VtAO2 ► B OV VsBO4 ►
Angular velocities Velocity Polygon for a Crank-Slider VtAO2 We can determine ω3: ω3 = VtBA / RBA RBA has to be rotated 90° clockwise to point in the same direction as VtBA. Therefore ω3 is clockwise ω4 equals zero, since the sliding joint prohibits any rotation with respect to the ground. A ω2 O2 ω3 RAO2 RBA RO4O2 ► B O4 RBO4 A VtBA VtAO2 B OV VsBO4






