Download
1 / 7
70 likes | 224 Views
THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES. GENERAL MOTION. The kinematic analysis of a rigid body which has general three-dimensional motion is best accomplish with the aid of principles of relative motion. Rotating Reference Axes.

E N D
GENERAL MOTION The kinematic analysis of a rigid body which has general three-dimensional motion is best accomplish with the aid of principles of relative motion.
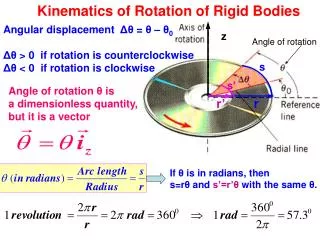
Rotating Reference Axes A more general formulation of the motion of a rigid body in space calls for the use of reference axes which rotate as well as translate. Reference axes whose origin is attached to the reference point B rotate with an absolute angular velocity which may be different from the absolute angular velocity w of the body.
The expressions for the velocity and acceleration of point A become Where, vrel and arel are the velocity and acceleration of point A measured relative to x-y-z by an observer attached to x-y-z.
We again note that is the angular velocity of the axes and may be different from the angular velocity w of the body. We observe that, if x-y-z are rigidly to the body, = w and vrel and arel are both zero.
Example 1 The motor housing and its bracket rotate about the Z-axis at the constant rate =3 rad/s. The motor shaft and disk have constant angular velocity of spin p=8 rad/s with respect to the motor housing in the direction shown. If g is constant at 30o, determine the velocity and acceleration of Point A at the top of the disk and the angular acceleration a of the disk.
Example 2 The circular disk is spinning about its own axis (y-axis) at the constant rate p=10p rad/s. Simultaneously, the frame is rotating about Z-axis at the constant rate =4p rad/s. Calculate the angular acceleration a of the disk and acceleration of Point A at the top of the disk. Axes x-y-z are attached to the frame, which has the momentary orientation shown with respect to the fixed axes X-Y-Z.