Download
1 / 46
490 likes | 908 Views
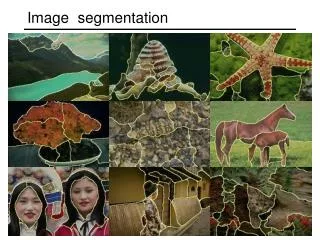
Learn about image segmentation techniques such as thresholding, edge detection, and region-based segmentation. Understand how to choose threshold values, implement adaptive thresholding, detect edges using various filters, apply second derivatives, and utilize the Hough transform. Explore methods like split-merge for region-based segmentation to partition images into meaningful components.

E N D
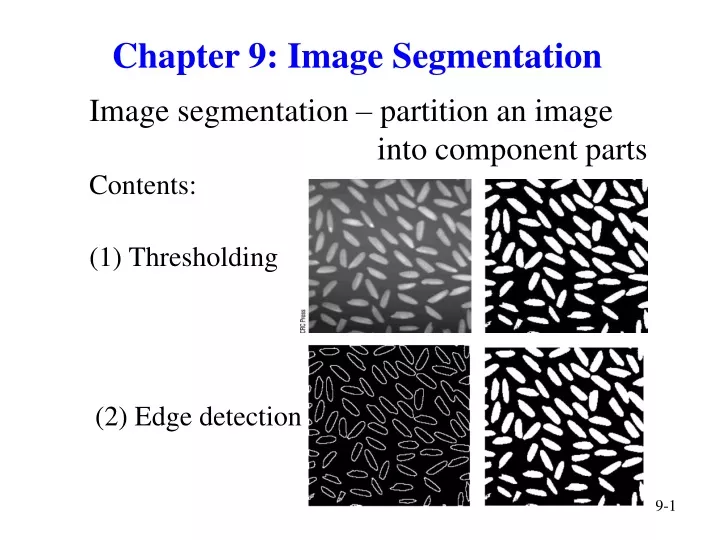
Chapter 9: Image Segmentation • Image segmentation – partition an image • into component parts • Contents: • (1) Thresholding (2) Edge detection
(3) Region-based segmentation Split Merge 2
◎ Thresholoding • 。 Single Thresholoding
。Advantages: • (i) Remove unnecessary detail • (ii) Bring out hidden detail
○ How to choose a threshold value • 。 Histogram method
。 Otsu’s thresholding method Describe the histogram as a probability distribution by
Let t be the determined threshold value • Define • Find t such that
○ Adaptive Thresholding • Divide image into strips • Apply Otsu’s method to each strip
。Variable thresholding (i) Divide image into blocks Global thresholding (ii) Compute histograms of block images
For each block image, compute its (1) Smooth histogram h
(2) Fit with mixture of Gaussian let v be the gray level corresponding to the deepest valley of
(3) Test biomodality (4) If the bimodality test is past, compute T by
(5) For block (x,y) whose threshold value T(x,y) • hasn’t yet been determined
(6) Smooth T by • (7) Determine thresholding • values of image pixels • by bilinear interpolation
Global thresholding Variable thresholding
◎ Edge Detection • 。Types of edge: • Step edge (jump edge) • Ramp edge • Roof edge (crease edge) • Smooth edge
Prewitt filters • 。Consider • Horizontal filter: , Smooth filter: • Combine • Vertical filter: , Smooth filter: • Combine
vertical horizontal Edge image Binary image Thinning
。Roberts filter: • 。Sobel filter:
◎ Second Derivatives • Laplacian:
Laplacian Filter: Invariant under rotation (isotropic filter)
Step edge: Ramp edge:
。 Second derivatives are sensitive to noise • 。 Other Laplacian masks
○ Zero crossing 0 +, + 0 0 -, -0 + -, -+
Example: Edge detection by taking zero • crossings after a Laplace filtering Marr-Hildreth method Smooth the input image using a Gaussian before Laplace filtering
。 Gaussian smooth + Laplace filtering • = Laplacian of Gaussian (LOG): • Gaussian: LOG:
Mexican hat: Difference of Gaussian (DOG):
◎ Canny edge detector • ○ Steps: Let • 1. Smoothing and Edge detection • (a) Horizontal direction • (b) Vertical direction • (c) Edge magnitude
2. Non-maximum suppression • (a) For each pixel p, • (b) Quantize to • 0, 45, 90 or 135 degs. • (c) Along • p is marked if its edge magnitude • is larger than both its two neighbors • p is deleted otherwise
3. Hysteresis thresholding • For each marked pixel p, • (a) If > or • (b) If and p is adjacent to • an edge pixel • p is considered as an edge pixel
○ Line equation: y = ax + b • A point on the line • Rewrite as • Another point Parameter space • on the line
Definition: • ◎ Radon Transform
○ Strongest edge detection: Giving the input image I(x, y), 1. Compute the binary edge image f(x, y) of I(x, y). 2. Compute the Radon transform of f(x, y). 3. Select the with greatest value of . • 4. The strongest line in I(x, y) is
Input image The RT of the binary edges of the input image The strongest edge
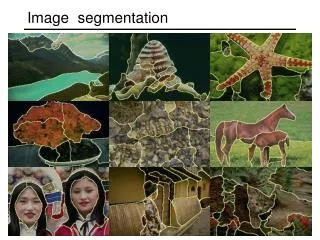
◎ Region-based Segmentation ○ Splitting and Merging Steps: 1. Equally divide the input image into 4 sub-images; 2. Compute the characteristics of each sub-image, e.g., intensity, color, texture etc; 3. Repeatedly divide sub-images into sub-sub-images if their characteristics are significantly different; 4. Repeatedly merge adjacent sub-images if their characteristics are similar enough. 42
Split Merge Different segmentations may result from region splitting and region merging approaches.
Input Image Region Boundary Segmentation