Download
1 / 12
120 likes | 131 Views
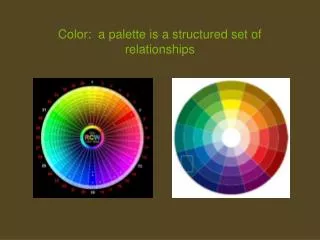
Learn about discrete-wavelength models, projection operators, fundamental components, and colors in the human visual subspace. Gain insights into color matching matrices and extracting stimuli components.

E N D
ECE 638: Principles ofDigital Color Imaging Systems Lecture 9: Discrete Wavelength Models Projection Operator
Synopsis • Review of discrete wavelength model
Discrete-wavelength trichomatic model • Stimulus • Sensor response • Response of the i-th channel • Define • Span(S) defines HVS subspace • Stack sensor outputs • Set of visually independent primaries • Color matching matrix for this set of visually independent primaries
Definition of projection operator • Projection operator is a linear operator that extracts the fundamental component of the stimulus , i.e. • Since , we can write that • Following the earlier development of the fundamental component , we have that • Substituting (3) into (2), we obtain • Comparing (4) with (1), we get
Alternate forms of projection operator • Based on fact that , we obtained • But for visually independent primaries. • Thus • Equations (5a), (5b), and (5c) are all equivalent.
Projection of monochromatic stimuli onto the human visual subspace • Recall that a monochromatic stimulus at wavelength can be expressed as • So the identity matrix represents the complete set of monochromatic stimuli. • Consider that • Thus ; so the columns of are the fundamental components of the monochromatic stimuli.
Relation between projection operator and fundamental component of primary mixtures for monochromatic stimuli • Recall that • Since is the fundamental component of , we also have that • So • Since the responses to and are identical, their fundamental components are also the same. But is the fundamental component of the monochromatic stimuli; so it already lies within the human visual subspace, i.e. • Thus, we have from Eq. (6) that
Extraction of fundamental component of stimulus: an imaging systems interpretation • A complete imaging system, can be thought of as a capture device followed by a display device. • The process of extracting the fundamental component of the stimulus, as described by Eq. (7a) from the preceding slide can be viewed in this way • i.e. • We also have • Combining (8) and (9) yields Sensor Display
Questions about the human visual subspace • Recall two earlier questions: • Question 1: Are there real stimuli that are invisible? • Answer: “No” • Question 2: Are there real stimuli for which ? • Not yet answered • Now introduce a third question: • Question 3: What colors in the fundamental space are physically realizable with the addition of a black space component, i.e. what colors have a physically realizable metamer?
Characterization of subset of fundamental space with physically realizable metamers • Theorem: A stimulus has a physically realizable metamer its fundamental component can be written as a non-negative linear combination of the columns of • Proof: • Suppose is physically realizable. (Here is fixed; and is one possible metamer for .) but since is physically realizable, its components are all non-negative. Therefore, Eq. (11) shows that the fundamental component is a non-negative linear combination of the columns of .
Characterization (cont.) • Theorem: A stimulus has a physically realizable metamer its fundamental component can be written as a non-negative linear combination of the columns of • Proof: • Suppose , where . This immediately leads to the conclusion that is a physically realizable metamer for . • This completes the proof of the theorem.