Download
1 / 6
80 likes | 1.35k Views
Introduction. P. A. ω 2. O 4. O 2. Velocity Analysis with Instant Centers for a Crank-Slider Mechanism (Inversion 2)

E N D
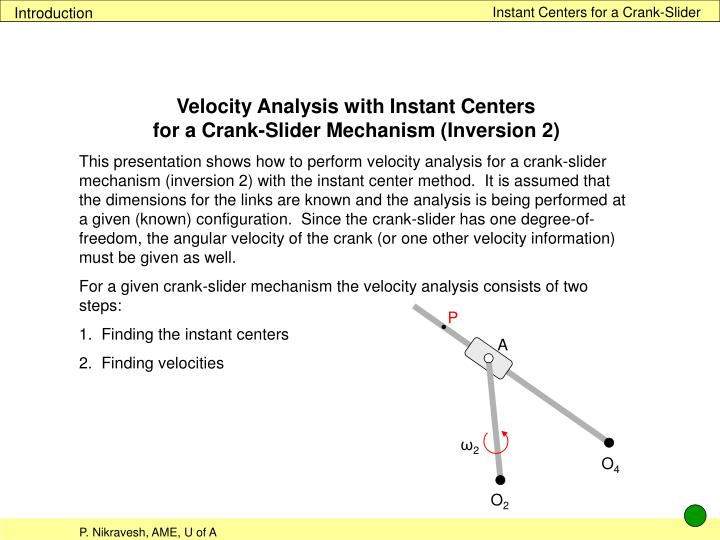
Introduction Instant Centers for a Crank-Slider P A ω2 O4 O2 Velocity Analysis with Instant Centersfor a Crank-Slider Mechanism (Inversion 2) This presentation shows how to perform velocity analysis for a crank-slider mechanism (inversion 2) with the instant center method. It is assumed that the dimensions for the links are known and the analysis is being performed at a given (known) configuration. Since the crank-slider has one degree-of-freedom, the angular velocity of the crank (or one other velocity information) must be given as well. For a given crank-slider mechanism the velocity analysis consists of two steps: Finding the instant centers Finding velocities
Crank-slider mechanism (inversion 2) Instant Centers for a Crank-Slider P A ω2 O4 O2 Crank-slider mechanism Assume that for this crank-slider mechanism all the link lengths are known and the angular velocity of the crank is given as ω2 ccw. In the configuration shown we can perform a velocity analysis with the instant center method.
Number of instant centers Instant Centers for a Crank-Slider A O4 O2 Number of instant centers The first task is to determine how many instant centers exist for a crank-slider. The number of links in a crank-slider is n = 4 Between n links, there are n (n −1) ∕ 2 instant centers. That means in a fourbar there are 4 (4 − 1) ∕ 2 = 6 instant centers. A small circle will help us keep track of locating each center. On the circumference of the circle we put as many marks as the number of links. Each time we find a center between two links, we draw a line between the corresponding marks on the circle. (3) (4) (2) (1) 1 2 ► 4 3
Finding the instant centers Instant Centers for a Crank-Slider Finding the instant centers Four of the centers are already known: They are the three pin joints and the sliding joint. Note: The instant center between two bodies connected by a slider is located in infinity on any axis perpendicular to the axis of sliding. We don’t know I1,3 but we know that it lies on the same line as I4,1 and I3,4. I1,3 also lies on the same line as I1,2 and I2,3. The point of intersection is I1,3. I2,4 is also unknown but it lies on the same line as I3,4 and I2,3. I2,4 also lies on the same line as I4,1 and I1,2. The point of intersection is I2,4. Now we have found all 6 centers. (3) =I3,4 A = I2,3 ► (4) (2) O4 = I4,1 (1) ► O2 = I1,2 ► ► I2,4 1 2 I1,3 ► 4 3 ► ►
Finding ω3 and ω4, knowing ω2 Instant Centers for a Crank-Slider Finding velocities A (or I2,3) is a point on link 2, therefore: VA = ω2 ∙ RAI1,2 Its direction is obtained by rotating RAI1,2 90° in the direction of ω2. A (or I2,3) is also a point on link 3, which rotates around I1,3. This means: VA = ω3 ∙ RAI1,3 Since we already know VA, we can solve for ω3: ω3 = VA∕ RAI1,3 Since links 3 and 4 are connected by a sliding joint, their angular velocities are the same; i.e., ω4 = ω3 ω3 A = I2,3 ► VA ω4 ω2 RAI1,2 I1,2 ► RAI1,3 I1,3 ►
Finding ω4 and ω3, knowing ω2 Instant Centers for a Crank-Slider Finding velocities We could have determined ω4 directly from ω2 : I2,4 is a point on link 2, therefore: VI2,4= ω2 ∙ RI2,4 I1,2 Its direction is obtained by rotating RI2,4 I1,2 90° in the direction of ω2. I2,4 is also a point on link 4, which rotates around I4,1. This means: ω4 = VI2,4∕ RI2,4 I4,1 Since links 3 and 4 are connected by a sliding joint, their angular velocities are the same; i.e., ω3 = ω4 ω3 ω4 ► ω2 I4,1 RI2,4 I4,1 I1,2 ► RI2,4I1,2 I2,4 VI2,4 ►






