Download
1 / 1
10 likes | 114 Views
Groo : Behavior-based Control of Real-time Game Agents. Developers: Aaron Khoo, Greg Dunham, Nick Trienens http://flexbot.cs.northwestern.edu. Movement behaviors control navigation. They affect 3 actuators: rotate, translate and strafe .

E N D
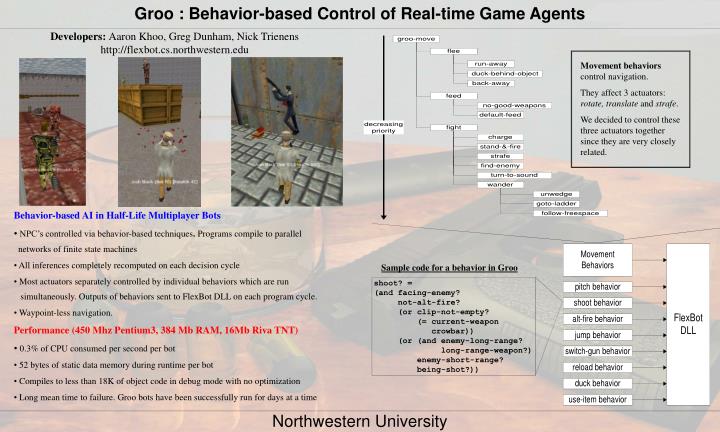
Groo : Behavior-based Control of Real-time Game Agents Developers: Aaron Khoo, Greg Dunham, Nick Trienenshttp://flexbot.cs.northwestern.edu Movement behaviors control navigation. They affect 3 actuators: rotate, translate and strafe. We decided to control these three actuators together since they are very closely related. • Behavior-based AI in Half-Life Multiplayer Bots • NPC’s controlled via behavior-based techniques. Programs compile to parallel networks of finite state machines • All inferences completely recomputed on each decision cycle • Most actuators separately controlled by individual behaviors which are run simultaneously. Outputs of behaviors sent to FlexBot DLL on each program cycle. • Waypoint-less navigation. • Performance (450 Mhz Pentium3, 384 Mb RAM, 16Mb Riva TNT) • 0.3% of CPU consumed per second per bot • 52 bytes of static data memory during runtime per bot • Compiles to less than 18K of object code in debug mode with no optimization • Long mean time to failure. Groo bots have been successfully run for days at a time Sample code for a behavior in Groo shoot? = (and facing-enemy? not-alt-fire? (or clip-not-empty? (= current-weapon crowbar)) (or (and enemy-long-range? long-range-weapon?) enemy-short-range? being-shot?)) Northwestern University






![[Report] Real-Time Marketing: The Agility to Leverage 'Now' by Rebecca Lieb](https://cdn4.slideserve.com/7672878/a-market-definition-report-real-time-marketing-dt.jpg)