Download

1 / 55
550 likes | 563 Views
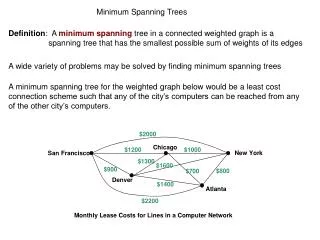
Explore the fundamentals of graph theory, spanning trees, and algorithms for communication network optimization. Delve into spanning tree applications and their cost functions, including Shortest Path Trees (SPT), Minimum Spanning Trees (MST), and Minimum Routing Cost Trees (MRCT).

E N D
Spanning Trees in Communication Networks Rui Campos INESC Porto, Faculdade de Engenharia, Universidade do Porto rcampos@inescporto.pt
Outline • Graph Theory • Spanning Trees • Algorithms • Spanning Trees Applications • Summary
About me • PhD student at University of Porto PhD Overview Auto-configuration and Self-management of Personal Area Networks considering: • intra- and extra-PAN connectivity • heterogeneity in IP networks • integration of multiple communication technologies • Researcher at INESC Porto Participation in FP6 Ambient Networks Project • 1st phase - protocol design, specification, and simulation • 2nd phase – automatic and dynamic IP connectivity establishment between Ambient Networks
1. Graph Theory Graph formal definition: A graph G=(V,E,w) is defined as a set of verticesV connected by a set of edges E=[V]2(i.e., the elements of E are 2-element subsets of V) with weights wthat represent costs assigned to the edges of G.
1. Graph Theory [some definitions] • Number of vertices in G is n = |V| • Number of edges in G is m = |E| • Degree of a vertex vis defined as its number of adjacent edges (an adjacent edge to v is an edge connecting it to a neighbor vertex) • Path in Gis defined as a sequence of connected adjacent vertices • Cost of path is equal to sum of weights of edges belonging to path • Cycle in Gis defined as a path where first and last vertex in sequence are the same
1. Graph Theory [graph types] undirected undirected weighted
1. Graph Theory [graph types] directed directed weighted
1. Graph Theory [specific types] complete graph metric graph all vertices have degree n-1 edge weights satisfy triangle inequality
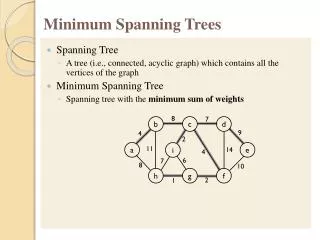
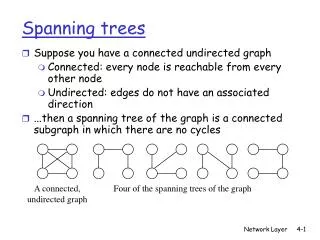
1. Graph Theory [specific types] tree spanning tree tree with n-1edges extracted from a graph G with n vertices graph without cycles
2. Spanning Trees [cost functions] • Path cost e.g., cT(1,3)=5+2=7 • Total cost Ctotal(T)=5+2+1=8 • Routing Cost Cr(T)= cT(1,2)+cT(1,3)+cT(1,4)+cT(2,1)+cT(2,3)+cT(2,4) + cT(3,1)+cT(3,2)+cT(3,4)+cT(4,1)+cT(4,2)+cT(4,3)=48
2. Spanning Trees [types] Shortest Path Tree (SPT) Minimum Spanning Tree (MST) Minimum Routing Cost Tree (MRCT) path cost total cost routing cost
2. Spanning Trees [SPT] The Shortest Path Tree (SPT) rooted at a vertex s defines a tree composed by union of the shortest paths between s and each of the other vertices in G such that:
2. Spanning Trees [SPT] Let’s see an example … SPT root at vertex 1: P(1,2) = (1,2) ; C(1,2) = 10 P*(1,2) = (1,3,2) ; C*(1,2) = 3 P**(1,2) = (1,3,4,2) ; C**(1,2) = 9 P(1,4) = (1,2,4) ; C(1,4) = 14 P*(1,4) = (1,2,3,4) ; C*(1,4) = 14 P**(1,4) = (1,3,2,4) ; C**(1,2) = 7 P***(1,4) = (1,3,4) ; C***(1,4) = 5 P(1,3) = (1,3) ; C(1,3) = 2 P*(1,3) = (1,2,3) ; C*(1,3) = 11 P**(1,3) = (1,2,4,3) ; C**(1,3) = 17
2. Spanning Trees [SPT] SPT root at vertex 1: P*(1,2) = (1,3,2) P(1,3) = (1,3) P***(1,4) = (1,3,4)
2. Spanning Trees[MST] The Minimum Spanning Tree (MST) represents the spanning tree T* such that: for all spanning trees T that can be computed from G
2. Spanning Trees[MST] Let’s see an example ... STs that can be computed from graph: Ctotal = 3+2+4 = 9 Ctotal = 3+5+4 = 12 Ctotal = 2+3+5 = 11 Ctotal = 2+4+5 = 11
2. Spanning Trees[MRCT] The Minimum Routing Cost Tree (MRCT) represents the spanning tree T* such that: for all spanning trees T that can be computed from G Note: computation of exact MRCT is a NP-hard problem
2. Spanning Trees [MRCT] Let’s see an example … STs that can be computed from graph: Cr = 12+4+9+12+8+3 +4+8+5+9+3+5=82 Cr = 2+4+5+2+6+3 +4+6+9+5+3+9=58 Cr = 2+4+9+2+6+11 +4+6+5+9+11+5=74 Cr = 2+10+5+2+8+3 +10+8+5+5+3+5=66
2. Spanning Trees [MRCT] Using other routing cost definition … STs that can be computed from graph: Cr = 12+4+9+8+3+5=41 Cr = 2+4+5+6+3+9=29 Cr = 2+4+9+6+11+5=37 Cr = 2+10+5+8+3+5=33
2. Spanning Trees[other types] • MRCT considering communication requirement (MRCT is optimal when communication requirements are equal) • Steiner Minimal Tree (SMT) • spans only a given subset of vertices in a graph G • minimizes same cost functions as MST • Minimum Diameter Spanning Tree (MDST) • diameter = cost of longest path between any two vertices in a tree • defines spanning tree of minimum diameter among all possible spanning trees Note: other types and further details can be found in [1]
2. Spanning Trees[2 interesting cases] • When edge weights of G are highly heterogeneous MST = MRCT = SPT (*) • When there is a single source s MRCT = SPTs (*) P. Mieghem, S. Langen, Influence of the link weight structure on the shortest path, Physical Review E 71 (2005) 056113-1–056113-13. P. Mieghem, S. M. Magdalena, Phase transition in the link weight structure of networks, Physical Review E 72 (2005) 056138-2–056138-7.
2. Spanning Trees[MST=MRCT=SPT] Let’s see an example ... STs that can be computed from graph: Cr=64; Ctotal=21 Cr=46; Ctotal=21 Cr=46; Ctotal=21 Cr=64; Ctotal =21 Cr=36; Ctotal =12 Cr=36; Ctotal =12 Cr=10; Ctotal =3 Cr=64; Ctotal =21 SPT
3. Algorithms[Prim’s algorithm] • Algorithm to compute MST for a graph G • Proposed by Robert Prim in 1957 • Time complexity O(n.m) • in its more naive implementation O(m.log(n)) • using binary heaps in conjunction with adjacency lists O(m+n.log(n)) • using Fibonacci heaps in conjunction with adjacency lists
Algorithm: PRIM Input: A weighted, undirected graph G=(V,E,w) Output: A minimum spanning tree T T ← 0 Let uV be an arbitrary vertex U ← {u} while |U| < n do find uU and v(V - U) such that edge (u,v) is the smallest edge between U and V – U and does not form a cycle T ← T {(u,v)} U← U {v}
3. Algorithms[Prim’s algorithm] Steps in a nutshell: (T ← 0) • Pick up arbitrary vertex v • Select edge (i,j) adjacent to v with lowest weight and add it to T • Select adjacent edge (i,j) to T with lowest weight that does not form a cycle and add it to T • Repeat step 3 until all vertices have been spanned
3. Algorithms[Prim’s algorithm] Let’s see an example ... input graph MST
3. Algorithms[Prim’s algorithm] Other possible result ... input graph MST
3. Algorithms[Kruskal’s algorithm] • Algorithm to compute MST for a graph G • Proposed by Joseph Kruskal in 1956 • Time complexity • O(m.log(m)) • using priority queues
Algorithm: KRUSKAL Input: A weighted, undirected graph G=(V,E,w) Output: A minimum spanning tree T Sort edges in E in nondecreasing order by weight T ← 0 Create one set for each vertex for each edge (u,v) in sorted order do if FIND_SET(u) FIND_SET(v) then T ←T {(u,v)} UNION(u,v) Legend
3. Algorithms[Kruskal’s algorithm] Steps in a nutshell: (T ← 0) • Pick up edge (i,j) with lowest weight that does not belong to T and does not form a cycle • Add edge (i,j) to T • Repeat step 1 and 2 until all vertices have been spanned
3. Algorithms[Kruskal’s algorithm] Let’s see an example ... input graph MST
3. Algorithms[Dijkstra’s algorithm] • Algorithm to compute SPT for a graph G • Proposed by Edsger Dijkstra in 1959 • Time complexity • O(n2) • in its more naive implementation • O(m.log(n)) • using binary heaps • O(m+nlog(n)) • using Fibonacci heaps
Algorithm: DIJKSTRA Input: A weighted, directed graph G=(V,E,w); a source vertex s. Output: A shortest path tree T rooted at s for each vV do δv ← ; pv ← NIL δs ← 0; T← 0; S ← V whileS 0 do choose uS with min(δu) S← S – {u} if u s then T← T {(pu,u)} for each vertex v adjacent to u do if (δv δu + w(u,v)) then δv ← δu + w(u,v) pv ← u
3. Algorithms[Dijkstra’s algorithm] Steps in a nutshell: (T ← 0; δv ← ; δs ← 0) • Select vertex v with min shortest path estimate and add edge (pv,v) to T • Re-evaluate shortest path estimates of vertices adjacent to v and update them and parent vertex in T if lower estimates are obtained • Repeat steps 1 and 2 until all vertices have been spanned
3. Algorithms[Dijkstra’s algorithm] Let’s see an example ... SPT rooted@vertex 1 input graph
3. Algorithms [Bellman-Ford algorithm] • Algorithm to compute SPT for a graph G • Proposed by Richard Bellman in 1958 • Works in more general cases • finds SPT even when graph has negative weights • Time complexity • O(n.m)
Algorithm: BELLMAN-FORD Input: A weighted, directed graph G=(V,E,w); a source vertex s. Output: A shortest path tree T rooted at s for each vV do δv ← ; pv ← NIL δs ← 0 for i ←1 to n-1 do for each (u,v)E do if (δv δu + w(u,v)) then δv ← δu + w(u,v); pv ← u for each (u,v)Edo if (δv δu + w(u,v)) then Output “A negative cycle exists”; Exit T← 0 forv(V-s) do T← T {(pu,u)}
3. Algorithms [Bellman-Ford algorithm] Steps in a nutshell: (T ← 0; δv ← ; δs ← 0) • For each edge (u,v) re-evaluate shortest path estimate δv and update it and pv if (δu + w(u,v) δv) • Repeat step 1 (n-1) times • The union of edges (pv,v) gives shortest path tree T
3. Algorithms [Bellman-Ford algorithm] Let’s see an example ... SPT rooted@vertex 2 E={(1,2),(2,1),(1,3),(3,1),(2,4),(4,3)} input graph Re-evaluation: for each (u,v)E do if (δu+ w(u,v) δv) then δv←δu+ w(u,v) SPT_rooted@2
3. Algorithms [Add algorithm] • Algorithm for finding approximate MRCT for a graph G • Proposed by Vic Grout in 2005 • Vertex oriented version of Prim’s algorithm • minimizes number of relay nodes in final spanning tree • Time complexity • O(n.log(n)) time in the worst case • usually, faster due to tendency for many nodes to be added to T at each step
Algorithm: ADD Input: undirected graph G=(V,E) Output: approximate minimum routing cost tree T T← 0 for allv V sv←0 for all u,v V wuv ←0 find u such that du ←max(dv), v V su←1 while there existsj such that sj = 0 do for each v V adjacent to u do wuv←1; sv←1; T← T {(pu,u)} find u such that (du− δu)← max(dj − δj) where sj = 1 Legend: sv=1 vT wuv – weight of edge (u,v) du – degree of vertex u δu – degree of vertex u in T
3. Algorithms [Add algorithm] Steps in a nutshell: • Pick up vertex v adjacent to maximum number of unspanned vertices • Add to T all edges adjacent to v that do not form a cycle • Repeat steps 1 and 2 until all vertices are added to T
3. Algorithms [Add algorithm] Let’s see an example ... approximate MRCT input graph
3. Algorithms [Wong’s algorithm] • Proposed by Richard Wong in 1980 • 2-approximate MRCT algorithm • Based on Dijkstra’s algorithm • Time complexity • O(n2.log(n)+m.n)
3. Algorithms [Wong’s algorithm] Steps: • Compute n SPTs using Dijkstra’s algorithm • Compute routing cost for each SPT • Select SPT with lowest routing cost 2-approximate MRCT
3. Algorithms [Wong’s algorithm] Let’s see an example ... SPT_rooted@3 SPT_rooted@1 SPT_rooted@2 SPT_rooted@8 SPT_rooted@6 SPT_rooted@4 SPT_rooted@5 SPT_rooted@7
3. Algorithms [Wong’s algorithm] Let’s see an example ... approximate MRCT
4. Spanning Trees Applications Minimum Spanning Tree (MST) cable TV network • cost-efficient connection of several end clients to infrastructure islands connection • cost-efficient connection of islands using bridges travelling salesman problem • NP-hard problem • MST can be used to find 2-approximate solution
4. Spanning Trees Applications Shortest Path Tree (SPT) routing protocols • Routing Information Protocol (RIP) • Open Shortest Path First (OSPF) • Ad-hoc On-demand Distance Vector (AODV) • Optimized Link State Routing (OLSR) multicast routing • minimization of path cost between source and destinations road network • find shortest path between a city and other cities in a country