Download
1 / 38
440 likes | 800 Views
Cours de Segmentation PLAN Introduction Segmentation par histogrammes (RHS) Region growing Split & Merge Algorithme CSC Contours Actifs (Snakes) Approche probabiliste: l’algorithme « CondDensAtion » Conclusion. Introduction. Segmenter une image?

E N D
Cours de Segmentation • PLAN • Introduction • Segmentation par histogrammes (RHS) • Region growing • Split & Merge • Algorithme CSC • Contours Actifs (Snakes) • Approche probabiliste: l’algorithme « CondDensAtion » • Conclusion
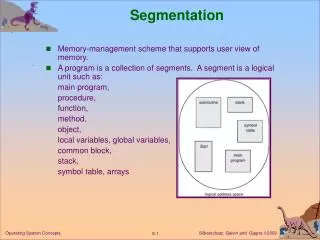
Introduction Segmenter une image? Partitionner l’image en zone homogènes selon un critère déterminé: couleur, texture, niveau de gris, indice,…
Introduction Un problème difficile. • Pourquoi les algorithmes présentés dans ce cours ne marchent-ils pas en général? • Pas de données contextuelles • Traitement global de l’image: pas de traitement actif, localisé dans l’image (voir cours Vision Active) • Pas d’exploitation explicite de la continuité spatio-temporelle (tracking), (sauf dans l’algorithme « Condensation »)
Introduction Plusieurs approches: En l’absence de contextes particuliers, les meilleurs résultats sont obtenus avec les méthodes hybrides. • Approches GLOBALES: histogrammes • Approches LOCALES: region growing, contours • Approches HYBRIDES: split & merge, CSC
Histogrammes Idée: Si les objets présents dans l’image ont des couleurs bien distinctes et uniformes, ils vont apparaître comme des pics dans l’histogramme. Zone « vert » nbr de pixels teinte => Segmentation dans un espace dérivé de l’image
Recursive Histogram Splitting (RHS) Ohlander (1975); Ohta, Kanade,Sakai (1980) Chaque pixel est décrit selon certains channels: R,G,B,H,S,V,… => L’algorithme travaille sur plusieurs histogrammes, un par channel MAX HB HR HG … voisinage Réinjection des régions de taille suffisante Retroprojection de la fenêtre de l’histogramme Image initiale Suppression de la région extraite
Recursive Histogram Splitting (RHS) • AVANTAGES • Méthode très rapide • Peu sensible au bruit • INCONVENIENTS • Méthode globale: ignore les informations de proximité qui permettent d’utiliser des seuils variables locaux. • Que se passe-t-il si deux objets ont la même couleur? => Nécessite en général un Region Growing pour détacher les composantes connexes.
Croissance de région (Region Growing) Idée: On part d’un point amorce (seed) et l’on l’étend en ajoutant les points de la frontières qui satisfont le critère d’homogénéité amorce croissance région finale • Le point amorce peut être choisi soit par un humain, soit de manière automatique en évitant les zones de fort contraste (gradient important) => méthode par amorce. • Si le critère d’homogénéité est local (comparaison de la valeur du pixel candidat et du pixel de la frontière) => méthode linéaire.
Croissance de région (Region Growing) Méthode linéaire (complexité 2n) Seuil S: P1 == P2ssiDiff(Col(P1),Col(P2)) < S 2 1 3 1 2 x 1 1 1 1 1 x==y: val = x x<>y: mettre à jour l’index Extremité(x) y y val=? x 1 1 2 2 3 3 … val = y y val=? 3 1 x val = Z (nouvel index) while (swap[x]!=x) x = swap[x]; y val=?
Croissance de région (Region Growing) Méthode par amorce (complexité O(n)) • On définit une zone R qui contient la région à extraire. • Initialement, R contient l’amorce. • On utilise une file FIFO (First In, First Out) S qui contient les points frontière • Initialement, S contient le voisinage de l’amorce. • On retire p dans S • si p est homogène avec R, • on ajoute p à R et on ajoute à S les points du voisinage de p qui ne sont pas dans R et qui ne sont pas incompatibles. • sinon, • on marque p comme incompatible. • On recommence tant que S n’est pas vide. Test local (pixels voisins) ou statistique global (calcul sur la couleur moyenne de R)
Croissance de région (Region Growing) • AVANTAGES • Méthode rapide • Conceptuellement très simple • INCONVENIENTS • Méthode locale: aucune vision globale du problème. En pratique, il y a presque toujours un chemin continu de points connexes de couleur proche qui relie deux points d’une image… • Problème du gradient: • Tenir compte de l’homogénéité globale donne un algorithme sensible à l’ordre de parcours des points (méthode par amorce) • Algorithme très sensible au bruit, peu stable.
Split & Merge Horowitz, Pavlidis (1976), Dubuisson, Jain (1993) Idée: Plutôt que de regrouper des pixels dans le region growing, pourquoi ne pas regrouper des zones homogènes pré-calculées sur l’image? Phase 1 : Créer les zones homogènes = SPLIT Phase 2 : Les regrouper = MERGE SPLIT: L’image est stockée dans un arbre. Initialement, arbre racine = image complète Récursivement, chaque feuille F est subdivisée en quatre si elle n’est pas assez homogène, et les quatre sous images sont ajoutée en tant que feuilles de F. L’algorithme poursuit tant qu’il reste des feuilles non homogènes à diviser.
Split & Merge Example Homogénéité = critère sur la variance Image initiale Split 1 Split 2 Split 3
Split & Merge Quadtree Construction du RAG Region Adjacancy Graph • Connecte les régions adjacentes • Arrêtes = mesures de différence d’homogénéité RAG
La distance en terme d’homogénéité de régions est portée par l’arrête valuée qui les relie dans le RAG Split & Merge MERGE: • Chaque nœud du Region Adjacency Graph est examiné. • Si un des voisins de ce nœud est à une distance inférieure à un seuil de regroupement, les deux nœuds fusionnent dans le RAG. • Lorsque plus aucun nœud ne peut fusionner avec l’un de ses voisins, STOP.
Split & Merge Original • AVANTAGES • Méthode hybride locale/globale: permet de contrer le problème du gradient. Split & Merge • INCONVENIENTS • Méthode assez complexe • Découpage un peu « carré », dû à la topologie des quadtrees
Algorithme CSC (Color Structure Code) Rehrmann (1994) Idée: Regrouper des structures de pixels qui se chevauchent et découper ensuite les zones communes par une descente récursive. L’algorithme CSC est un algorithme Merge & Split basé sur une topologie hiérarchique hexagonale avec recouvrements. pixel shift Ilot niveau 1
Algorithme CSC (Color Structure Code) Ilot de niveau 1 Ilot de niveau 0 Pixel Structure sous-jacente: arbre Ilot de niveau 2
élement (niveau 0) Algorithme CSC (Color Structure Code) PHASE 1 : INITIALISATION Localement pour chaque îlot de niveau 0, on construit une partition en éléments (de niveau 0). élement = région de couleur homogène pixel îlot (niveau 0)
Élément niveau 1 (n+1) Propriété: deux éléments de niveau n se touchent ssi ils possèdent au moins un élément de niveau n-1 en commun. Élément niveau 0 (n) Algorithme CSC (Color Structure Code) PHASE 2 : REGROUPEMENT • Les éléments de niveau n sont regroupés en éléments de niveau n+1 si: • Ils sont de couleur proche • Ils se touchent On se place dans un ilôt de niveau n+1 (ici n=0, pour l’exemple) On considère les éléments de niveau n contenus dans les îlots de niveau n Îlot de niveau 1 (n+1)
Algorithme CSC (Color Structure Code) PHASE 2 : REGROUPEMENT Les éléments sont structurés sous forme d’arbre, tout comme les îlots Elements de niveau n: Elements de niveau n+1:
Algorithme CSC (Color Structure Code) PHASE 2bis : DECOUPAGE Le problème du chaînage d’éléments localement identiques n’est pas résolu à ce stade (Problème du gradient) L’algorithme CSC permet de gérer ce problème dans la phase de découpage, qui a lieu en parallèle de la phase de regroupement. Découpage: Que se passe-t-il dans la phase de regroupement lorsque deux éléments de niveau n sont connectés mais de couleurs incompatibles? ?
élément E2 (n+1) élément S1 (n) élément S (n) élément S2 (n) élément E1 (n+1) S attribué à E1 ou E2? Attribution à celui dont la couleur est la plus proche (ici E2) => découpage récursif Algorithme CSC (Color Structure Code) DECOUPAGE îlot niveau n+1 îlot niveau n S n’est pas encore complètement séparé de E1 car il reste une intersection avec S1 et S2 S appartient à la fois à E1 et E2 (sont existence est garantie par les propriétés du réseau de recouvrement hexagonal)
Split & Merge Algorithme CSC (Color Structure Code) Original • AVANTAGES • Méthode hybride locale/globale: permet de contrer le problème du gradient. • Excellente découpe des frontières de zone • Multi-échelle • Intrinsèquement parallèle Algorithme CSC • INCONVENIENTS • Méthode plus complexe
Contours Actifs (snakes) Kass, Witkin, Terzopoulos (1987) Idée: Utiliser des courbes déformables qui sont « attirées » par les formes recherchées dans l’image. Analogie avec la physique: fonction d’énergie à minimiser. Un exemple classique Le « snake » se contracte et s’adapte à la forme de l’horloge
Propriétés intrinsèques • Longueur, courbure… • Propriétés locales de l’image autour du snake Contours Actifs (snakes) Qu’est ce qu’un snake? P9 P8 P10 P7 P11 P6 P3 P5 P1 P4 P2
Contours Actifs (snakes) Comportement dynamique du snake? Minimiser l’énergie totale (interne + externe) Calculer les forces à appliquer à chaque point de contrôle de telle sorte que l’énergie soit minimisée
Contours Actifs (snakes) Exemple d’énergie INTERNE: Energie de contraction élastique Force élastique sur le point de contrôle i Comportement: tend à rétrécir le snake, tout en maintenant une répartition homogène des espaces entre les points de contrôle. Forme limite: le point.
Contours Actifs (snakes) Exemple d’énergie INTERNE: Energie de courbure Tend à redresser le snake et à limiter la courbure. Forme limite: le cercle Exemple d’énergie EXTERNE (Image): Zones brillantes ou sombres: Contours en tant que maxima de la norme du gradient: Répulsion d’une zone:
Contours Actifs (snakes) Illustrations Energie élastique Energie de courbure Zones brillantes
Algorithme « ConDensAtion » • Condensation = Conditional Density Propagation • (algorithme de type “contours actifs”) • Algorithme probabiliste intégrant: • des informations contextuelles (modèle observationnel • adapté au problème) • des connaissances a priori • une intégration temporelle (tracking)
Algorithme « ConDensAtion » X = espace de description des contours (=> connaissances a priori sur la forme à segmenter) Z = espace de description des observations Approche probabiliste bayesienne pour les contours actifs: Prior: modélisation a priori des contours possibles Likelihood of X ou modèle observationel: modélisation des observations attendues pour un contour donné. Choix de X:
Algorithme « ConDensAtion » Factored Sampling algorithm (approche du type « Filtrage Particulaire »): Principe général: on construit itérativement un ensemble de points dans l’espace de recherche, tels que leur répartition corresponde à la densité de probabilité recherchée. Un des avantages: modélisation utilisable pour des densités quelconques et pas uniquement gausiennes. Exemple dans le cas de la segmentation par contours actifs: • A partir d’un prior p’(X), générer une population de points {s(1),…,s(N)} • Associer à chaque s(i) un poids donné par (i) et échantillonner selon (s(k),(k))
Algorithme « ConDensAtion » Condensation = Conditional Density Propagation Entrée: l’échantillon au temps tk-1 soit : Itérer Sortie: un nouvel échantillon au temps tk Construction de la sortie: 1. Sélectionner un échantillon de la façon suivante: 0 • Générer un nombre aléatoire r dans [0,1] • Trouver le plus petit j tel que • Choisir 2. Prédire en échantillonnant sur pour choisir les . Par exemple, pour une dynamique Auto Regressive linéaire, utiliser: 3. Mesurer et pondérer les nouveaux échantillons selon: Puis, normaliser de telle sorte que et stocker sous la forme Avec
Algorithme « ConDensAtion » Exemple simple de modèle d’observation, dans un cas monodimensionnel: z1 z2 z4 z3 P(Z/X) x
Algorithme « ConDensAtion » Condensation : Schéma de fonctionnement
Mais le cerveau obtient de bien meilleurs résultats… Quelle est le secret? • Problème très difficile (50 ans de recherche et pas de solution) • Pistes crédibles: - utilisation du contexte, vision liée aux objectifs, apprentissage, énorme bibliothèque d’algorithme spécifiques (reco visages par exemple) VISION ACTIVE Conclusion • Existe-t-il une meilleure technique de segmentation? • Non, tout dépend du contexte, de l’application • Dans sa catégorie (segmentation région selon couleur à base de merge/split), CSC est souvent le meilleur • Existe-t-il une « super technique », peut être encore inconnue, qui obtienne de très bon résultats en segmentation? • Non, en l’absence de contexte, la quantité d’information disponible est limitée. Les algorithmes du type CSC ne sont probablement pas loin de l’optimum.
Liens Cours: http://uei.ensta.fr/baillie Stages: http://cogrob.ensta.fr