Download
1 / 27
390 likes | 1.45k Views
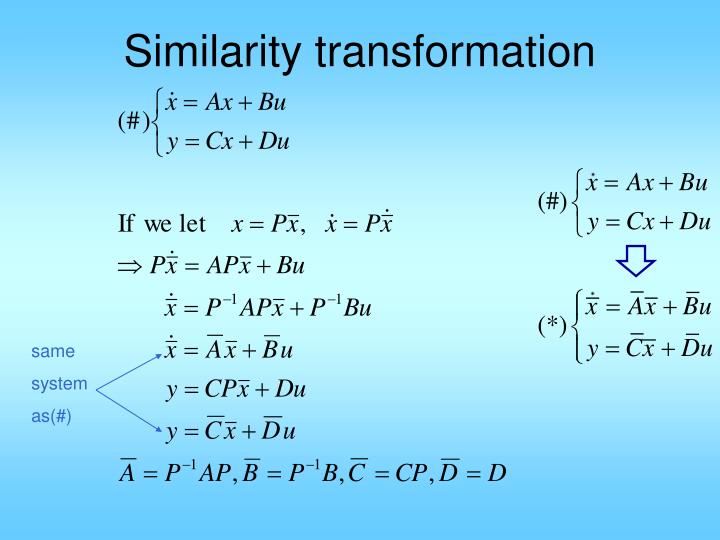
Similarity transformation. same system as(#). Controllability:. Example:. Controller Canonical Form:. Completely Controllable. Controllability:. Only need to check this for eigenvalues. Controllability:. PBH test for diagonal case. PBH test for block Jordan diagonal case.

E N D
Similarity transformation same system as(#)
Controller Canonical Form: Completely Controllable
Controllability: Only need to check this for eigenvalues
State Feedback D r + u + 1 s x + y B C + - + A K feedback from state x to control u
Pole placement Solve this to get k’s.
Pole placement In Matlab: Given A,B,C,D ①Compute QC=ctrb(A,B) ②Check rank(QC) If it is n, then ③Select any n eigenvalues(must be in complex conjugate pairs) ev=[λ1; λ2; λ3;…; λn] ④Compute: K=place(A,B,ev) A+Bk will have eigenvalues at these values
Invariance under state feedback Thm: Controllability is unchanged after state feedback. But observability may change!