Download
1 / 28
280 likes | 385 Views
Sampling Based Sensor-Network Deployment. Volkan Isler, Sampath Kannan and Kostas Daniilidis University of Pennsylvania. Outline. Background knowledge Deployment Methods Conclusion Discussion. Outline. Background knowledge Deployment Methods Conclusion Discussion. Deployment.

E N D
Sampling Based Sensor-Network Deployment Volkan Isler, Sampath Kannan and Kostas Daniilidis University of Pennsylvania
Outline • Background knowledge • Deployment Methods • Conclusion • Discussion
Outline • Background knowledge • Deployment Methods • Conclusion • Discussion
Deployment • How to place sensor nodes in the target area • In this paper, authors assumed it is impossible or very difficult to place sensors precisely (ex. Dissemination from airplane on foreign territory) • Result in random geometric networks
Deployment • Two important requirements: Coverage and Connectivity • Coverage: Every point in the environment is within the range of at least one sensor • Connectivity: Every sensor can communicate with every other sensor
Deployment • Problem: What is the minimum number of sensors needed for guaranteed coverage and connectivity? • Reasons why need minimum • Too much cause interference, and easily detected by adversaries • Decrease invasiveness in natural environment
Two ways for deployment • Deployment be accomplished in one step • If deployment can implemented in multiple steps incremental deployment
Sampling Based? • The “sample” here is a term in machine learning • Find most representative samples • Sample = Sensor units
Critical Concepts • Set-Systems • Vapnik-Chervonenkis (VC) dimension
Set System EX: X = {1,2,3} R = { {}, {1}, {2}, {3}, {1,2}, {1,3}, {2,3}, {1,2,3} }
VC-dimension • a measure of the capacity of a statistical classification algorithm VC-dimension:
VC-dimension Find VC-dimension for disk set system X: all the points on the plane A: the 3 black points, is a subset of X
VC-dimension VC-dimension: Y is a subset of A (the 3 black points) R is the certain subset of X such that R intersect A become to Y (R is a certain collection of points on the plane)
VC-dimension R Find VC-dimension for disk set system Y Y is a subset of A (the 3 black points) R is the certain subset of X such that R intersect A become to Y (R is a certain collection of points on the plane)
VC-dimension Find VC-dimension for disk set system 3 points shattered by 8 disks: for any subset of these 3 points, there exists a disk that contains only those points and none other.
VC-dimension 4 points can not be shattered: There are no disks that contain only the black points. So 3 is VC-dimension of the disk set system
Definition: Let sampling points form an . If the size of event (R) is larger than specific range (epsilon), the event will be intersected by one of the sampling point. If the sensors form an,this means any activity within a specified range (determined by epsilon) will be intersected (detected) by one of the sensors
Outline • Background knowledge • Deployment Methods • Conclusion • Discussion
One Step Deployment • Find the necessary number of sensors to form • By calculate - with this much points drawn at random from R is an epsilon-net with probability at least • Place at location chosen uniformly
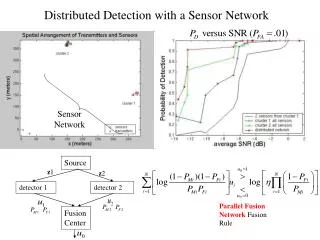
One Step Deployment • Make sure the connectivity • Derive the lower bound communication range by (random graph connectivity) : communication range n : n points sampled uniformly p : graph is connected with probability p
Multiple Steps Deployment Trivial but not ensure the connectivity
Guarantee coverage and connectivity using a few sensors as possible Model is general and simple, but can present bounds on the number of sensor required Two scenarios have been address: concurrent and incremental deployment Conclusion
Discussion • The target application for this paper is outdoor deployment, can we use these methods in indoor deployment?