Download
1 / 14
140 likes | 361 Views
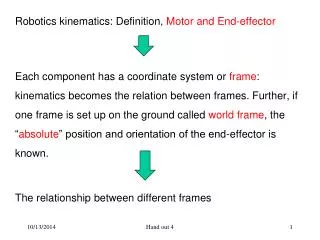
End effector. End effector - the last coordinate system of figure Located in joint N . But usually, we want to specify it in base coordinates . 1. End effector. A transformation from the link N to the base : . 2. End effector. We can also express it as

E N D
End effector • End effector - the last coordinate system of figure • Located in joint N. • But usually, we want to specify it in base coordinates. 1
End effector A transformation from the link N to the base : 2
End effector • We can also express it as • three rotations (around each of the coordinate axes) • followed by a translation • How can we establish a relation with the other expression ? 3
End effector • The originof a coordinate frame relative to some base coordinate frame is specified by the translation : 4
End effector • Any 3D orientation relative to some base coordinate frame can be specified by : three rotations, one around each of the coordinate axes. We do them in this order : around x, y, z. 5
End effector • Orientation • The roll, pitch and yaw transformation is then expressed : 7
End effector • Finally, thetransformation from a coordinate frame to the base frame is expressed : 8
End effector We obtain directly the translation vector : 9
End effector We can obtain the yaw angle : Because : arctan is π-periodic. Let’s use our function arctan2 to get the right angle. 10
End effector Knowing the yaw angle, we can obtain the pitch angle : Because : Again, let’s use our function arctan2 : 11
End effector We can obtain the roll angle : Because : Again, let’s use our function arctan2 : 12
End effector Let’s define the state vector 13
End effector As previously shown, The state vector is composed of elements of this matrix. It’s also a function of joint parameters : 14