Download
1 / 1
• 20 likes • 174 Views
Development of A Robotic Tank Based on A Smart Camera. Aviad Dahan and Daniel Alon , under the supervision of Oren Rosen Technion - Israel Institute of Technology, Faculty of Electrical Engineering Control Robotics and Machine Learning Laboratory. Our Goal. Stages of the Project.

E N D
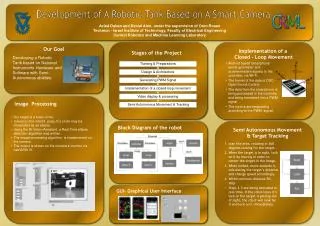
Development of A Robotic Tank Based on A Smart Camera AviadDahan and Daniel Alon, under the supervision of Oren Rosen Technion - Israel Institute of Technology, Faculty of Electrical Engineering Control Robotics and Machine Learning Laboratory Our Goal Stages of the Project Implementation of a Closed - Loop Movement Developing a Robotic Tank based on National Instruments Hardware and Software with Semi- Autonomous abilities. Android based Smartphone sends gyrometer and accelerometers signals to the controller, via Wi-Fi. The format of the data is OSC - Open Sound Control. The data from the smartphone is being processed in the controller and being translated into a PWM signal. The motors are responding according to the PWM signal. Image Processing • Our target is a black circle. • based on the robot’s pose, the circle may be interpreted as an ellipse. • Using the NI Vision Assistant, a Real Time ellipse detection algorithm was written. • The image processing algorithm is implemented on the camera. • The output is shown on the console’s monitor via LabVIEW VI. Block Diagram of the robot Semi Autonomous Movement & Target Tracking scan the area, rotating in 360 degrees looking for the target. When the target is in sight, lock on it by moving in order to center the target in the Image. When locked, move towards it, calculating the target’s distance and change speed accordingly. Within minimal distance R0, stop. Steps 2-3 are being executed in real time. If the robot loses it’s lock or the target is getting out of sight, the robot will look for it and lock on it immediately. GUI- Graphical User Interface