Download
1 / 31
310 likes | 400 Views
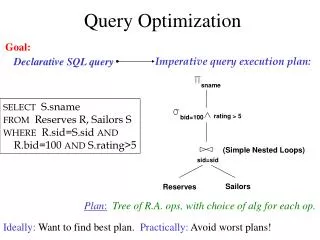
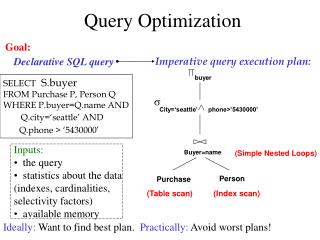
Query Optimization for Semistructured Data. Jason McHug, Jennifer Widom Stanford University. - Rajendra S. Thapa. ………..Road Map. Lore System Query Execution Engine Statistic and cost model Performance Results. Lore Data Model - OEM. Data Guide. Path Expression. Simple Path Expression

E N D
Query Optimization for Semistructured Data Jason McHug, Jennifer Widom Stanford University - Rajendra S. Thapa
………..Road Map Lore System Query Execution Engine Statistic and cost model Performance Results
Path Expression Simple Path Expression • specifies a single-step navigating in the database DBGroup.member y • denotes variable y ranges all member-labeled sub-objects of the object assigned to x Path Expression • ordered list of simple path expressions DBGroup.Member x, x.Age y -variable y ranges over all objects that can be reached by starting with the DBGroup object, following an edge labeled Member, then following an edge labeled Age.
Query: SELECT x FROM DBGroup.Member x WHERE exists y in x.Age: y<30 <Member> <Name>Smith</Name> <Age>28</Age> <Office>Gates 252 </Office> <Office> <Building> CIS </Building> <Room>411 </Room> </Office> </Member> Query language Result:
Lore architecture Textual Interface Query Processing Parsing Preprocessor Logical Query Plan Generation Query Optimization Physical Query Plan Generation Execution of Physical Query Plan Data Engine
SELECT x FROM DBGroup.Member x WHERE exists y in x.Age: y<30 Queries can be executed in many ways Top down Hybrid Bottom Up
Query Select x from A.B x where exists y in x.C: y = 5 A • top down would explore only this path • - only one path A.B.C • bottom-up would visit all leaf objects • with value 5 and their parents D D B C C C 5 5 5 Top-down preferred
Query Select x from A.B x where exists y in x.C: y = 5 A • Many A.B.C paths • But only a leaf satisfying the predicate • bottom-up is a good candidate B B B C C C 4 4 5 Bottom-up preferred
Query Select x from A.B x where exists y in x.C: y = 5 A D B B B B D B C C C 4 4 5 Hybrid preferred
Query Execution Engine • Logical Query Plans -logical query plan operators - structure of the plan • Physical Query Plans -operators - some physical plans • Statistics and Cost Model • Plan Enumeration
Query Execution Engine Logical Query plans Logical operators Discover Chain Glue Create Temp Project --- --- --- • Variable binding • a variable x in the query is said to be bound if object o has been assigned to x • Evaluation • an evaluation of a query plan (or sub-plan) is a list of all variables appearing in the plan along with the object(if any) bound to each variable. • Rotation
Representation of a Path expression in the logical query plan x.B y, y.C z, z.D v Chain Discover(z,”D”,v) Chain Discover(x,”B”,y) Discover(y,”C”,z)
Complete logical query plan SELECT x FROM DBGroup.Member x WHERE exists y in x.Age: y<30 Project(t2) CreatTemp(x,t2) Glue Chain Glue Name(“DBGroup”,t1) Discover(t1,”Member”,x) Exists(y) Select(y,<30) Discover(x,”Age”,y)
Query Execution Engine Physical Query plans x Operators Scan(x, l, y) Lindex(x, l, y) Pindex(Path Expression, x) Bindex(l, x, y) Name(x, n) Vindex(Op, Value, l, x) --- --- --- l l l a c b y = {a, b, c}
Some physical plans for a simple logical Query Plan A.B x, x.C y Chain Discover (A,”B”,x) Discover (x,”C”,y) Logical Query Plan
physical plans A.B x, x.C y NLJ NLJ Lindex (x,”C”,y) Name (t, A) Scan (A,”B”,x) Scan (x,”C”,y) Scan Plan Lindex (t,”B”,x) Lindex Plan
more physical plans... A.B x, x.C y NLJ Name (t, A) Scan (x,”C”,y) Pindex(“A.B x, x.C y”, y) Bindex (t,”B”,x) Pindex Plan Bindex Plan
how physical plans are produced. • Each logical plan node creates an optimal physical plan given a set of bound variable. • During plan enumeration we track 1. Whether the variable is bound or not 2. Which plan operator has bound the variable 3. All other plan operators that use the variable 4. Whether the variable is stored within a temporary result.
how physical plans are produced. SELECT x FROM DBGroup.Member x WHERE exists y in x.Age: y<30 Logical plan
possible physical plans Fig. (a) Logical plan
possible physical plans Physical plans fig. (c) Logical plan
more physical plan…. Fig. (d) Logical plan
Statistic and Cost Model • Each physical plan is assigned a cost based on the estimated I/O and CPU time required to execute a plan. • The costing procedure is recursive. • I/O first then CPU time to decide the cheaper plan.
Performance Result Experiment 1 A simple query SELECT DBGroup.Movie.Title -11 different query plans - * the best plan uses Lore’s path index to quickly locate all the movie titles - second plan is top-down strategy - the worst plan uses Bindex operators and hash joins
Performance Result Experiment 2 Same query with a Genere subobject having value ‘Comedy’ - point query
Performance Result Experiment 3 - Same point query - all possible plans are not executed - different plans were generated or disallowing the use of particular operator or indexes.
Performance Result Experiment 4 Query selects movies with certain quality rating.
…….future Work • Optimization techniques for branching path expression • a query rewrite that moves Where clause predicates into the From clause and a transformation that introduces a Group-by clause when a large number of paths pass through a small number of objects. • Partially correlated sub-plans • similar to correlated subqueries but rely on the bindings passed between portions of the physical query plan rather than on the query itself. • In the area of statistic • efficient statistics-gathering algorithms • statistic about the location of objects on disk • modification to the cost formulas to generate more accurate cost estimates