Download
1 / 14
140 likes | 162 Views
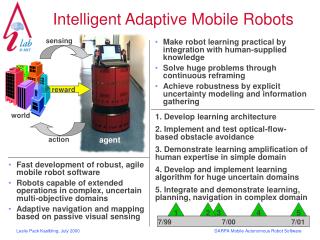
Enhance student learning and retention in computer science by engaging them in problem-solving with wheeled robots. Promote synthesis of information, viable solution design, and implementation skills. Utilize active learning pedagogy and experiential projects to foster constructivist learning. Access resources on a dedicated website for hands-on projects. The Handy Car initiative at SUNY Plattsburgh leverages simple robots to facilitate interactive education.

E N D
Facilitating Active Learning with Inexpensive Mobile Robots Stephen Paul Linder Brian Edward Nestrick Symen Mulders Catherine Lavelle SUNY Plattsburgh
Goals • Improve student learning throughout the computer science curriculum • Improve student retention rates • Promote good problem solving skills, including skills in • synthesis of relevant information, • design of viable solutions using partial information, and • implementing designs SUNY Plattsburgh
Approach • Use of simple wheeled robots as a software platform SUNY Plattsburgh
Rationale From Magnesen, 1983 SUNY Plattsburgh
Why a Car? • Stable mechanical base • Easily understood by anyone who has ever driven a car • Provides exposure to embedded and real-time software SUNY Plattsburgh
Pedagogy • Active learning • The ability to learn through interaction with one’s environment. Examples are • Team projects • Lab classes • Collaboration with faculty • Constructivist Learning requires • the construction individual models of knowledge • a manipulation space which reflects the effects of the student’s actions • Real machines rather than simulation SUNY Plattsburgh
Robot Overview SUNY Plattsburgh
Parts List Total Cost: $602 SUNY Plattsburgh
Example Projects SUNY Plattsburgh
Locate and Find a Beacon • Locate beacon and then traverse obstacles to beacon. • Beacon • Infrared source modulated at 38 kHz • Detector • Sharp IS1U60 TV remote control sensor • Obstacles • “Short” 2x4 studs on edge • “Tall” copier paper boxes SUNY Plattsburgh
Active Steering of a Tractor Trailer • Can a trailer automatically steer its back wheels so that the turning radius is reduced? Remember to show videos SUNY Plattsburgh
Maze Mapping • Using a robot under control of a PC to automatically generate maps of simple mazes, e.g. Remember to show videos SUNY Plattsburgh
Website • Website contains • Parts and price list • Mechanical and electrical assembly instruction • Software Library • Find link at http://faculty.plattsburgh.edu/stephen.linder/ Academic/ProgrammingProject/index.html SUNY Plattsburgh
Conclusion • The Handy Car has provided a valuable facilitator of active learning at SUNY Plattsburgh. • Future work • Upgrade processor board to HC12 to facilitate faster communications to Handy Car. • Finalize software to share one Handy Car among multiple students using a client/server architecture. SUNY Plattsburgh