Download
1 / 30
300 likes | 381 Views
A matrix generation approach for eigenvalue optimization. Mohammad R. Oskoorouchi California State University San Marcos San Marcos, CA, USA. International Conference on Continuous Optimization Rensselaer Polytechnic Institute August 2 – 4, 2004. Outline:. Eigenvalue optimization

E N D
A matrix generation approach for eigenvalue optimization Mohammad R. Oskoorouchi California State University San Marcos San Marcos, CA, USA International Conference on Continuous Optimization Rensselaer Polytechnic Institute August 2 – 4, 2004
Outline: • Eigenvalue optimization • From optimization to feasibility • Weighted analytic center • Recovering feasibility • Adding a p-dimensional matrix • Adding a column • Computational experience. • Future extensions
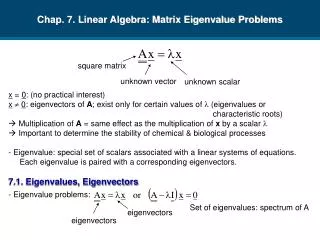
Eigenvalue optimization: Consider the following optimization problem:
Maximum eigenvalue function: • Continuous • Convex • nondifferentiable • nonpolyhedral cone • Cannot be written as the point-wise maximum of finite number of convex smooth function
The objective function can be cast as a semidefinite program: Now let be a feasible point and the maximum eigenvalue of has multiplicity , and be a matrix whose columns form a basis for the eigenspace for the maximum eigenvalue. By restricting to a subcone generated at the query point, we obtain a lower bound for
Let us study the inequality more closely: or
is a compact convex set with nonempty interior, composed of linear and semidefinite inequalities. • contains the optimal solution set • is referred to as the set of localization
Weighted Analytic Center The weighted analyticis defined as the maximizer of the weighted dual potential function:
The primal formulation The weighted analytic center can be alternatively derived by the weighted primal potential function:
Projection to the primal null space: This condition may not satisfy due to the computational round-off error. We therefore project the primal directions back to the primal null space.
Recovering feasibility: So far, we reformulated the eigenvalue optimization problem into a convex feasibility problem, and derived a query point as an approximate analytic center of the set of localization: The eigenvalue function is evaluated at this point and there are two cases:
Adding a p-dimensional matrix: If f is not differentiable at the query point y, an oracle returns a subgradient of f at this point. The subgradient is in the form of semidefinite inequality and will be used to update the set of localization. Dual set of localization will be updated via
Primal set of localization: Due to computational difficulties with the deep cuts, in practice we use the primal set to recover centrality. We now need a strictly feasible point for the updated primal set of localization.
Primal updating direction: Implementing Newton method, one has
Primal updating direction: The objective function of this problem is composed of a quadratic term and a self-concordant function. Therefore, Newton method is suitable to solve this problem:
Primal updating direction: The Newton step dT is obtained by setting the gradient of F(T+dT) with respect to dT to zero: