Download
1 / 23
430 likes | 833 Views
STEPPER MOTOR. J. Belwin Edward Assistant Professor Senior School of Electrical Engineering VIT University Vellore. Applications. Computer peripherals Textile industries IC fabrications Robotics Applications requiring incremental motion Typewriters Line printers Tapedrives

E N D
STEPPER MOTOR J. Belwin Edward Assistant Professor Senior School of Electrical Engineering VIT University Vellore
Applications Computer peripherals Textile industries IC fabrications Robotics Applications requiring incremental motion Typewriters Line printers Tapedrives Floppy disk drives Numerically-controlled machine tools Process control systems X-Y plotters
Applications contd…. • Commercial, military and medical applications • Mixing, cutting, striking, metering, blending • Application in manufacture of packed food stuffs • Application in manufacturing of commercial end products • Production of science fiction movies.
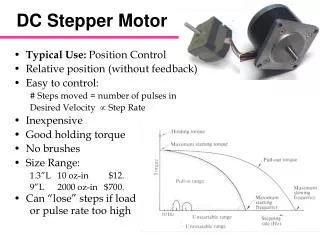
Step Angle - β • As small as 0.78o to 90o • Most commonly used – 1.8o, 2.5o, 7.5o, 15o β = (Ns-Nr) x 360o = 360o Ns.Nr mNr Ns – No. of Stator poles (teeth) Nr – No. of Rotor poles (teeth) m - No. of stator phases
Resolution • Resolution = No. of steps/revolution = 360o/β
Types • Variable Reluctance - VR • Permanent Magnet - PM • Hybrid
Variable Reluctance ( VR) stepper motor • Wound Stator poles • Single Stack • Multiple Stack – smaller step angle • Rotor poles – ferromagnetic material • Direction – stator current polarity • Reluctance of the magnetic circuit formed by rotor and stator teeth varies with angular position of the rotor
Variable Reluctance stepper motor Single Stack
Modes of operation –VR type • 1-phase ON – full step operation • 2-phase ON • Half-step – alternate 1-phase & 2-phase mode • Micro stepping
Permanent Magnet stepper motor • Wound Stator poles • Single Stack • Multiple Stack – smaller step angle • Rotor poles – permanent magnet • Rotor Shape - Cylindrical • Direction – stator current polarity
Modes of Operation – PM type • 1-phase ON mode • 2-phase ON mode • Half step mode
Hybrid stepper motor • Combination of VR and PM • Wound Stator poles – (similar to VR) • Single Stack • Multiple Stack – smaller step angle • Rotor poles – permanent magnet • Rotor shape – not Cylindrical • Direction – stator current polarity