Download
1 / 49
490 likes | 564 Views
Explore the theoretical concepts of shear strength of solids based on dislocation mechanics and stress-strain relations. Learn about the movement of edge and screw dislocations, Burgers vector, core region, and self-energy in isotropic media. Understand the characteristics and behavior of various types of dislocations in crystals.

E N D
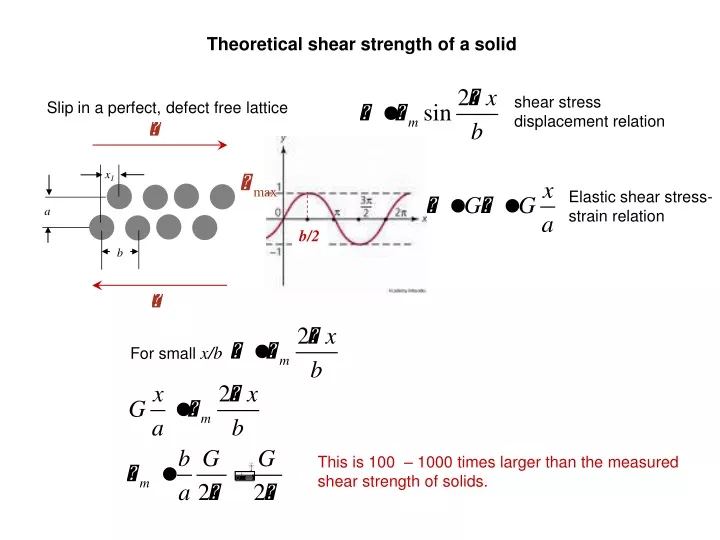
Theoretical shear strength of a solid shear stress displacement relation Slip in a perfect, defect free lattice x1 Elastic shear stress-strain relation a b/2 b For small x/b This is 100 – 1000 times larger than the measured shear strength of solids.
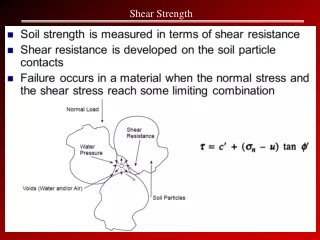
Vacancy Perfect Crystal Self - interstitial Dislocation Mechanics Defects in Solids Point Defects; these are thermodynamic in the sense that T and ΔGf define the concentration. For Tmp ~ 103 K , xv ~ 10 -5
Line defects - Dislocations F’ F Crystal analogue Movement of an “edge” dislocation
Useful rule: Points in direction of extra half plane Take the same path around the dislocation in the imperfect crystal. If the path encircles a dislocation (the area encircled by the path should be large enough so that it avoids the heavily distorted area around the supposed dislocation), then it will no longer close. In this case, the Burgers vector points from the start of the path to the end of the path (hence "start-finish"). edge dislocation Def: Burgers vector; b The “strength” of an edge SF/RH convention In a perfect crystal trace out a right-handed path around the line. In the perfect crystal this path should be constructed so that it closes. "Right-handed path" means you point the thumb on your right hand in the line direction , then the path is traced following the sense of your curved fingers.
b Continuum analogue of an edge dislocation b plane-strain displacement of an edge dislocation. A cut is made along the cylinder axis and the surfaces are displaced by b.
screw dislocation Right-handed screw Left-handed-handed screw
Continuum analogue of an screw dislocation Right-handed screw dislocation along the axis of a cylinder of radius R and length L. A Burgers circuit operation shows the dislocation has a positive b.
where and is a unit vector normal to the slip plane mixed dislocation
Conservation of b “node” Dislocation must end at a free surface, dislocation node (intersection with other dislocations), grain boundary, or other type of defect (but not a point defect, for instance). A dislocation can not end in the middle of a perfect region of crystal. Reversing the sense of the dislocation line by reversing the direction of causes to reverse direction. Formal def. of b
Stress fields of straight dislocations in isotropic solids Screw dislocation The dislocation is “made” by making a cut defined by and sliding the bottom of the cut surface over the top by an amount b in the +z direction. The displacement is discontinuous as the cut surface and is The diagram also shows that the displacement uz increases uniformly with θ to give the discontinuity; Right-handed screw dislocation along the axis of a cylinder of radius R and length L. A Burgers circuit operation shows the dislocation has a positive b.
Note that the displacement is only a function of x and y. Using the definition of strains in terms of displacements; we can immediately obtain the strains and then using the linear elastic isotropic constitutive equations obtain the stresses. Rectangular coordinates Cylindrical polar coordinates
Edge dislocation The displacement field and strains of the edge dislocation can not be determined by inspection as was the case for the screw. Instead, we must solve the bi-harmonic equation. It turns out the appropriate Airy stress function takes the form, Using the relation between the stress function and the stresses we obtain; An edge dislocation with indicated plain strain displacements. Rectangular coordinates Cylindrical polar coordinates
Mixed dislocation The stress components for edge dislocations include while those for a screw dislocation are Since a mixed dislocation has both screw and edge character it will include all the stress components from both edge and screw. The only issue is that for the edge component of the mixed dislocation in place of b in the stress field equations for an edge dislocation you must use only the edge component of b, bsinθ. Likewise, for the screw component of the mixed dislocation in place of b in the stress field equations for a screw dislocation you must use only the screw component of b, bcosθ.
Strain energy and self- energy of straight dislocations in isotropic media Screw dislocation It’s easiest to work this out for the stress filed in cylindrical polar coordinates since we have only one stress The strain energy is The strain energy per unit length of dislocation line is ro is called the “core” region of the dislocation and corresponds to a region around the dislocation where the displacements are so large that linear elasticity breaks down.
The size of this core region depends on crystal structure. For example dislocations in fcc solids have a bit larger core regions than that in bcc solids. Generally one can write , where is 0.5 – 2 for metals, ~ 2 for an ionic solid such as NaCl and ~1.2 for covalent crystals. The self energy of a dislocation includes the elastic energy per unit length plus a term related to the core energy of the dislocation. For screw dislocations this additional term is so, we can write the self energy of the dislocation line per unit length as Edge dislocation The strain energy is calculated for the edge dislocation the same way as it was for the screw except we have more terms!
Substituting for the stresses and integrating, we obtain This result is identical in form to that obtained for the screw except for the factor of 1-n. The core-cutoff size is the same as that discussed for the screw. The core energy of the edge is so the self energy of the edge dislocation can be written as,
Mixed dislocation The strain energy of a mixed dislocation can be written as where is In a similar fashion the self energy of a mixed dislocation can be written as
Forces on dislocations We can expect a gradient force to act on a dislocation if the mechanical energy of the system is a function of the position of the dislocation: To a dislocation we can expect that it is immaterial whether the stresses acting on it are internal or external in origin. We want to find a relation between an external or internal stress and it’s action on the dislocation.
Consider an unstrained body with no dislocation present. Apply and external force per unit area over the surface of the body. causes an elastic displacement and the strain energy in the body is just the work done by the force, An interesting and often not appreciated result is that since the strain energy of a body is independent of the position of the dislocation, the presence of the dislocation does not alter the elastic constants of the material.
Now form a dislocation by cutting and applying to the cut faces a force causing Also, there is work done by as is being applied. The total strain energy is
Now we can do exactly the same thing in reverse. First form the dislocation by applying resulting in and then apply Alternatively we could remove and then in the manner of a thermodynamic cycle. Since does not act on Also, is single valued whereas is equal and opposite on the two sides of the cut surface; the work gained on one face of the cut is exactly balanced by the work lost on the other face,
Also, this means that the work done by over S and A as the dislocation is formed must sum to zero. The “force” on the dislocation will be due entirely to the external work that is done when it moves, So, therefore is independent of the position of the dislocation. This means that the elastic constants are insensitive to the presence or location of stationary dislocations. *This is for an “infinite” solid as the presence or effect of surfaces is not taken into account.
This may be considered as the force per unit length acting on a dislocation line where is the stress in the slip plane in the slip direction. and
Edge dislocation S Screw dislocation glide climb edge & mixed dislocations only one glide plane (mixed dislocations also) any crystallographically allowable glide plane screw dislocations don’t climb (unless they have a small edge component) S S
Dislocation Climb Figure showing edge dislocation climb
Jogged edge dislocation indicating annihilation and removal of atomic planes.
Climb: important in high temperature creep (helps in dislocation annihilation and circumventing obstructions) dislocations are important sinks and sources for vacancies adsorbing vacancies emitting vacancies dislocation emitting or absorbing vacancies? dislocation emitting or absorbing vacancies?
Mixed & edge dislocations have only one glide plane and can’t cross slip S Screw dislocations can cross-slip Cross slip is important as a means of dislocations 1) rearranging themselves, 2) getting around obstacles and 2) annihilating (dynamic recovery) -S +S
Force on a Dislocation: Peach Koehler Equation Consider a mixed dislocation of line direction and Burgers vector b. A stress acts on the crystal. Question: What is the force (per unit length) acting on the dislocation? We know that, in principle, if the dislocation moves by a displacement r, then the work done on the crystalwill be dW. climb component glide component
Force on a Dislocation: Peach Koehler Equation L Let us calculate dW. To do so we need to move the dislocation by an amount dr. This is the way we move it: We first make a cut of length L (the length of the dislocation) and width dr. The area of this cut we denote |dA|, where the vector dA points perpendicular to the plane of the cut:
Peach Koehler Equation (continued) L Note: While making the cut we don’t want the faces of the cut to move in the presence of the applied stress. In order to prevent that from happening, we have to apply tractions to the surfaces of the cut that are equal and opposite to the applied stress. Next, while the tractions are applied, we shift the two faces with respect to each other by an amount b. In order to do this it might be necessary to take material away from the cut and place it on the surface of the crystal (or vice versa) so that the dislocation can climb. (This will be necessary if dr lies outside the glide plane). While we are moving the two surfaces, two things are happening: 1) The external stress is doing work on the crystal, 2) The dislocation is effectively moving by an amount dr to the new location.
Peach Koehler Equation (continued) The amount of work done is given by: with This can be rearranged to give: The force per unit length acting on the dislocation is therefore: Peach-Koehler Equation
Climb and glide forces The component of force per unit length acting in the direction of climb is: The glide force (the most important component low temps) is: where trss is the resolved shear stress, that is, the component of stress acting on the glide plane and in the direction of the Burgers vector. The glide force acts perpendicular to the line of the dislocation in such a way as to expand the slipped area.
Examples y Mixed dislocation with a tangent vector in the negative z-direction and a Burgers vector x z force for glide force for climb
Examples z Dislocation with a tangent vector in the +x direction and a Burgers vector b Apply stresses All other stresses are zero. y x
Examples z b y x Note that if we had chosen a coordinate system like this then y y x z b x z
Examples We want to calculate the force (per unit length) that dislocation A exerts on dislocation B. y z z x A B r Since the stress field assumes that the dislocation is at the origin of the coordinate system, we place A there and note that the tangent vector is parallel to the z-direction. Then the PK Equation takes the form Since
Examples We want to calculate the force (per unit length) that dislocation A exerts on dislocation B. B y The x-y position of dislocation B is r z x A z
Osmotic or Chemical Force Suppose that there is a super saturation or deficit of vacancies: The crystal has N vacancies instead of N0, the equilibrium number for a given temperature and pressure. In this case the excess free energy per vacancy is A dislocation which is at least partly edge can climb to create or destroy vacancies, moving the crystal back toward equilibrium and thereby lowering the free energy of the crystal. Suppose the dislocation absorbs dN vacancies by climbing a distance dx, r ì b is the edge component of b where í e W is the volume per vacanc y î v
Osmotic force (continued) The change in free energy of the crystal is The osmotic force, per unit length, is v v v v
Line Tension of a dislocation The line tension T can be approximated as l l r The maximum stress occurs at r=l/2
Dislocation Sources in Crystals The Frank-Read source
Dislocation point defect interactions The elastic interaction energy between a point defect and a dislocation results from the interaction of the volume change associated with the defect and the hydrostatic stress field of the dislocation. The interaction is in the form of a pDV work term: The volume change associated with a point defect is The mean stress of an edge dislocation is
Dislocation point defect interactions The interaction energy is For r ~ b the interaction energy is maximum at negative misfit r positive misfit
t h x l Strain caused by a glide dislocation moving through a crystal When a glide dislocation moves a distance x on its slip plane in a crystal of length l, height h, and thickness t the plastic shear strain that results is When there are N dislocations parallel to the t direction and they all move an average distance as the dislocation Defining the total strain in the crystal is density,
Image forces on dislocations A free surface or interface separating materials with “different” elastic constants will exert a “force” on a dislocation. This is a gradient force in the sense that the dislocation can lower its energy by moving either toward or away from the interface. y A x z B r A screw dislocation A is near a free surface. B is the “image” of A and is of opposite sign placed symmetrically wrt A so that the free surface boundary conditions are satisfied;
Image forces on dislocations The stress field of the screw dislocation is at y = 0, For x = r at the free surface Application of the PK equation for the force that B exerts on A yields
Image forces on dislocations This is the equivalent of a gradient force. Consider the elastic energy per unit length of a screw dislocation; The gradient force is given by