Download
1 / 20
200 likes | 207 Views
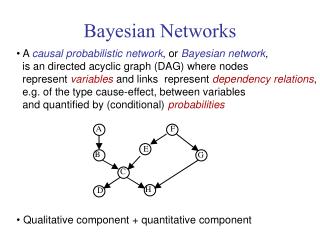
Bayesian networks are a graphical notation for representing conditional independence assertions and compactly specifying joint distributions. They provide a simple and efficient way to represent probabilistic relationships between variables in complex domains.

E N D
Motivation • We saw that the full joint probability can be used to answer any question about the domain, but can become intractable as the number of variables grow. • Furthermore specifying probabilities of atomic events is rather unnatural and can be very difficult unless a large amount of data is available from which to gather statistics. • Human performance, by contrast, exhibits a different complexity ordering: probabilistic judgments on conditional statements involving a small number of propositions are issued swiftly and reliably, while judging the likelihood of a conjuction of many propositions is done with a great degree of difficulty and hesitancy. • This suggests that the elementary building blocks which make up human knowledge aren’t the entries of joint probability table but, rather, the low-order conditional probabilities defined over small clusters of propositions.
Bayesian networks • A simple, graphical notation for conditional independence assertions and hence for compact specification of full joint distributions. • Syntax: • a set of nodes, one per variable • a directed, acyclic graph (a link means: "directly influences") • a conditional distribution for each node given its parents: P (Xi | Parents (Xi)) • The conditional distribution is represented as a conditional probability table (CPT) giving the distribution over Xi for each combination of parent values.
Example • Topology of network encodes conditional independence assertions: • Weather is independent of the other variables • Toothache and Catch are conditionally independent given Cavity, which is indicated by the absence of a link between them.
Another Example • I'm at work, neighbor John calls to say my alarm is ringing, but neighbor Mary doesn't call. Sometimes it's set off by minor earthquakes. Is there a burglar? • Variables: Burglary, Earthquake, Alarm, JohnCalls, MaryCalls • Network topology reflects "causal" knowledge: • A burglar can set the alarm off • An earthquake can set the alarm off • The alarm can cause Mary to call • The alarm can cause John to call
Example cont’d The topology shows that burglary and earthquakes directly affect the probability of alarm, but whether Mary or John call depends only on the alarm. Thus our assumptions are that they don’t perceive any burglaries directly, and they don’t confer before calling.
Compactness of Conditional Probability Tables (CPT’s) • A CPT for Boolean Xi with k Boolean parents has 2krows for the combinations of parent values • Each row requires one number p for Xi = true(the number for Xi = false is just 1-p) • If each variable has no more than k parents, the complete network requires O(n · 2k) numbers • I.e., grows linearly with n, vs. O(2n)for the full joint distribution • For burglary net, 1 + 1 + 4 + 2 + 2 = 10 numbers (vs. 25-1 = 31)
Semantics • The full joint distribution is defined as the product of the local conditional distributions: P(x1, … ,xn) = i = 1 P(xi | parents(xi)) e.g., P(j m a b e) = P(j | a) P(m | a) P(a | b, e) P(b) P(e) = …
Constructing Bayesian networks 1. Choose an ordering of variables X1, … ,Xn 2. For i = 1 to n • add Xi to the network • select parents from X1, … ,Xi-1 such that P(Xi | Parents(Xi)) = P(Xi | X1, ... Xi-1) This choice of parents guarantees: P(X1, … ,Xn) = i =1P(Xi | X1, … , Xi-1) (chain rule) = i =1P(Xi | Parents(Xi)) (by construction)
Example • The ordering of variables is very important. • E.g. suppose we choose the ordering M, J, A, B, E Adding MaryCalls: No parents P(J|M) = P(J)? Is P(John calling) independent of P(Mary calling)? Clearly not, since, on any given day, if Mary called, then the probability that John called is much better than the background probability that he called. So, we add a link from MaryCalls to JohnCalls.
Example • Suppose we choose the ordering M, J, A, B, E Adding the A (Alarm) node: Is P(A | J, M) = P(A | J)? P(A | J, M) = P(A)? No. Clearly, if both call, it’s more likely that the alarm has gone off that if just one or neither call, so we need both MaryCalls and JohnCalls as parents.
Example • Suppose we choose the ordering M, J, A, B, E Adding B (Burglary) node: Is P(B | A, J, M) = P(B | A)? P(B | A, J, M) = P(B)? Yes for the first. No for the second. If we know the alarm state, then the call from John or Mary might give us information about the phone ringing or Mary’s music, but not about burglary. So, we need just Alarm as parent.
Example • Suppose we choose the ordering M, J, A, B, E • Adding E (Earthquake) node: Is P(E | B, A ,J, M) = P(E | A)? P(E | B, A, J, M) = P(E | A, B)? No for the first. Yes for the second. If the alarm is on, it is more likely that there has been an earthquake. But if we know there has been a burglary, then that explains the alarm, and the probability of an earthquake would be only slightly above normal. Hence we need both Alarm and Burglary as parents.
Example cont’d • So, the network is less compact if we go non-causal: 1 + 2 + 4 + 2 + 4 = 13 numbers needed instead of 10 if we go in causal direction. • Deciding conditional independence is hard in noncausal directions • Causal models and conditional independence seem hardwired for humans!
So… • Bayesian networks provide a natural representation for (causally induced) conditional independence • Topology + CPT’s = compact representation of joint distribution • Generally easy for domain experts to construct
Noisy-OR • Even if the maximum number of parents k is small, filling the CPT for a node is tedius. • Uncertain relationships can often be characterized by so-called “noisy OR” relation, which is generalization of logical OR. • In propositional logic, we might say that Fever is true if Cold, Flu, or Malaria is true. • The noisy-OR allows for uncertainty about the ability of each parent cause to cause the child to be true. • The causal relationship may be inhibited, and so a patient could have cold, but not exhibit fever. • So, suppose we managed to find out the probabilities of inhibitions: P(fever | cold, flu, malaria) = 0.6 P(fever | cold, flu, malaria) = 0.2 P(fever | cold, flu, malaria) = 0.1 • Now, we can easily construct the “truth” table:
Observe that by using the “noisy-OR” we needed to specify 3 entries only instead of 8. In general, for k parents, we need to specify k entries instead of 2k.
Exact Inference in Bayesian Networks • The basic task for any probabilistic inference system is to compute the posterior probability for a set of query variables, given some observed event – that is, some assignment of values to a set of evidence variables. • Notation: • X denotes query variable • E denotes the set of evidence variables E1,…,Em, and e is a particular event, i.e. an assignment to the variables in E. • Y will denote the set of the remaining variables (hidden variables). • A typical query asks for the posterior probability P(X=x|e), i.e. P(x|e1,…,em). • E.g. We could ask: What’s the probability of a burglary if both Mary and John calls, P(burglary | johhcalls, marycalls)?
Inference by enumeration Slightly intelligent way to sum out variables from the joint without actually constructing its explicit representation
Numerically… P(b | j,m) = P(b) eP(e)aP(a|b,e)P(j|a)P(m|a) = …= * 0.00059 P(b | j,m) = P(b) eP(e)aP(a|b,e)P(j|a)P(m|a) = …= * 0.0015 P(B | j,m) = <0.00059, 0.0015> = <0.284, 0.716>. Complete it for exercise