Download

1 / 19
190 likes | 358 Views
Activities of GSCAR: Systems Control, Automation and Robotics. Basic Research Advanced Control Systems Develops Control Methods and Algorithms The general goal is: high performance and robustness for uncertain dynamic systems The main techniques under investigation are:

E N D
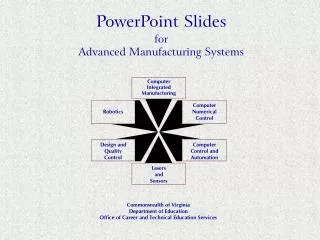
Activities of GSCAR: Systems Control, Automation and Robotics
Basic Research • Advanced Control Systems • Develops Control Methods and Algorithms • The general goal is: high performance and robustness for uncertain dynamic systems • The main techniques under investigation are: • Linear and Nonlinear Robust/Adaptive Control • Sliding Mode Control • Intelligent Control (GA, Neural Networks and Fuzzy Logic) • Nonlinear and Multivariable Predictive Control • Extremum Seeking Control (Real Time Optimization) Corpo do texto.
Applied Research • Industrial Process Automation and Control • Advanced Control Algorithms • Automatic Controller Tuning • Optimization and Extremum Seeking Control • Modeling and Identification • Fault Detection, Diagnosis and Reconfiguration (under fault) • Industrial Field Networks • Dynamic Positioning of Offshore Platforms Corpo do texto.
Applied Research (cont.) • Robotics • Underwater Robotics (Oil and Gas Industry, Environment Control) • Terrestrial Hybrid Robots (Environmental Monitoring in the Amazon) • Aerial Unmanned Vehicles (AUV’s): Helicopter for Monitoring of Electrical Transmission Lines • Industrial Robotics (Active Vison and Force Feedback) • Robotics in Strategical Areas (IED disposal, platform Inertial Stabilization) • Robotics for Increased Offshore Installations Autonomy and Remote Control (Onshore Remote Control Center) Corpo do texto.
RECENT PROJECTS (ongoing) • PROANTAR-Development of an ROV (LUMA) for • Biodiversity and Environmental Impact Monitoring in the • Antartic (CNPq). • Inertially Stabilized Platforms for Strategical Applications • (ARES). • Performance Evaluation of Industrial Automation Control Networks (LEAD/Petrobras) • Advanced Control for Nanopositioning with Piezoelectric • Actuators (CNPq) • Robotics based Remote Control for Highly Automated • Offshore Production Systems (LEAD/Petrobras). Corpo do texto.
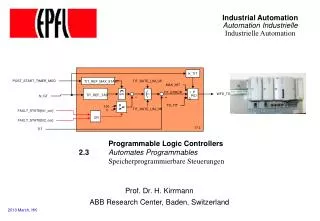
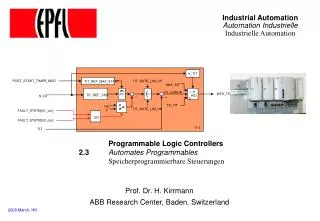
Industrial Field Networks: Interoperability, Interchangeability, Asset Management Systems DCSs
Field Bus Foundation Work Stations FF Devices
Network Structure Interoperable Environment
texto. GOAL: Human Resources Formation and a Field Bus Foundation Certification Center
Project: Development of a minihelicopter for aerial power line inspection Corpo do texto.
Project: Development of a minihelicopter for aerial power line inspection Corpo do texto.
Project: Model P-13 Objective: Development of an embedded electronics module to implement a dynamic positioning system Corpo do texto.
Project: Development of underwater robot LUMA to study the biodiversity and environmental impact in Antarctica Título da Objective: Photographic and high definition video surveying, data collection, and environmental sampling. Corpo do texto.
Project: Robotics in Strategical Areas (IED disposal, platform Inertial Stabilization Título da Objective: IED disposal Mobile Robot Corpo do texto.
RECENT PROJECTS (submitted) • Planning, Customization, Operation and Mission Analysis for • ROV’s: Inspection and Work Class (3,000m) (partners: MV2 and Georadar): • Main activity of GSCAR: Development of national technology for design and contruction of ROV’s for Oil and Gas Offshore Exploration. • Environmental Characterization and Evaluation of Biogenics Resources of the Brazilian Continental Coast and Adjacent Ocean Zone – National Institute of Science and Technology (INCT-CARBOM) • Main activity of GSCAR: Development of national underwater technology: ROV’s and Scientific Instrumentation. Corpo do texto.
Corpo do texto. Support Vessel for INCT-CARBOM
Corpo do texto. INCT-CARBOM mission planning