Download
1 / 3
30 likes | 191 Views
Problem 11: Complex Hierarchical Scheduling. 10 Tasks - with jitter - with bursts - deadline = period - deadline < period deadline > period preemptive & independent 3 Scheduling Policies - Rate Monotonic - Earliest Deadline First - Fixed Priority Hierarchical Scheduling

E N D
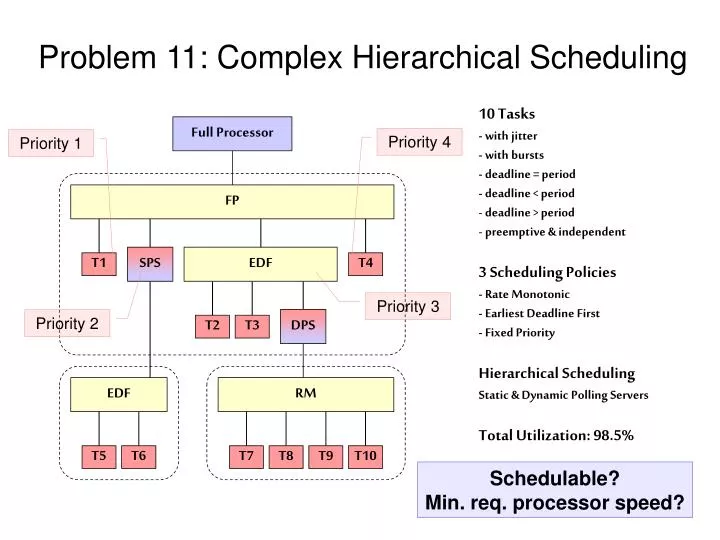
Problem 11: Complex Hierarchical Scheduling • 10 Tasks • - with jitter • - with bursts • - deadline = period • - deadline < period • deadline > period • preemptive & independent • 3 Scheduling Policies • - Rate Monotonic • - Earliest Deadline First • - Fixed Priority • Hierarchical Scheduling • Static & Dynamic Polling Servers • Total Utilization: 98.5% Full Processor Priority 4 Priority 1 FP SPS EDF T1 T4 Priority 3 DPS Priority 2 T2 T3 EDF RM T5 T6 T7 T8 T9 T10 Schedulable? Min. req. processor speed?
Real-Time Load Specification pSPS = 4 (period) pDPS = 3 (period) eSPS = 1 (execution share) eDPS =1 (execution share) dSPS = 4 (deadline) dDPS = 3 (deadline)
Periodic Server • A polling server can be thought of as a periodic task T (p, e). • When the server-task T is selected to run by the scheduler, the server-task checks whether workload is waiting to be processed by the server. • If yes, the server will provide e resources to process the waiting workload. • If no work is available for the server, the task will immediately be finished, i.e. the server will not check for arriving work anymore until the next period starts. • While the server is processing, it is preemptable. When it is preempted, it is put back into the ready-queue. • If the server could not provide e resources during a time interval T, even though there was always enough work available, then this is treated the same as a deadline-miss. I.e. the system is considered to be not schedulable.