Download
1 / 42
680 likes | 1.12k Views
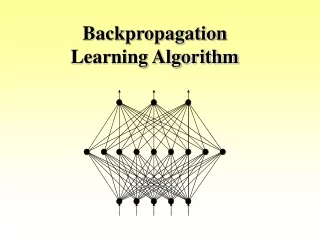
BACKPROPAGATION. Dr. Benyamin Kusumoputro. Arsitektur JNPB. JNPB terdiri dari : satu lapis masukan satu atau lebih lapis tersembunyi satu lapis keluaran.

E N D
BACKPROPAGATION Dr. Benyamin Kusumoputro
Arsitektur JNPB • JNPB terdiri dari : • satu lapis masukan • satu atau lebih lapis tersembunyi • satu lapis keluaran. • Lapisan masukan hanya bertugas meneruskan masukan dan tidak melakukan komputasi, sementara lapisan tersembunyi dan lapisan keluaran melakukan komputasi. • Jumlah neuron pada lapisan masukan sama dengan jumlah ciri atau atribut pada pola yang akan dikenali, sedang jumlah neuron pada lapisan keluaran sama dengan jumlah kelas pola.
Algoritma 1. Tentukan inisialisasi bobot awal • Random • Nguyen Widrow 2. Mekanisme komputasi jaringan Terdapat dua macam jenis komputasi, • komputasi maju (forward pass) • komputasi balik (backward pass).
Algoritma (2) 2.a. Komputasi Maju Dalam komputasi maju, menghitung nilai aktivasi semua neuron (lapis tersembunyi dan lapis keluaran); mulai dari neuron masukan menuju neuron keluaran • Neuron pada lapis tersembunyi menghitung nilai total masukan : menjumlahkan perkalian sinyal masukan dari lapisan masukan dengan bobot antara lapisan masukan dan lapisan tersembunyi, dan bias tertentu. • Neuron tersebut lalu menghitung nilai aktivasi dengan menerapkan fungsi aktifasi pada nilai total masukan. • Sinyal keluaran dari lapisan tersembunyi menjadi masukan bagi lapisan keluaran. Neuron pada lapisan keluaran menghitung nilai total masukan neuron keluaran (lihat 1).
Algoritma (3) • Neuron bersangkutan menghitung nilai aktivasi neuron keluaran dengan menerapkan fungsi aktifasi pada nilai total masukan neuron keluran (lihat 2). Step 1 : Selama kondisi stopping FALSE, lakukan Step 2-9 Step 2 : Untuk setiap pasangan pelatihan, lakukan Step 3-8 (Proses Feedforward) : Step 3 : Setiap unit input (Xn, n = 1,…,N) : - menerima input xn - mengirimkannya ke semua unit layer diatasnya (Hidden layer).
Algoritma (4) Step 4 : Setiap unit hidden (Zm, m = 1,…,M) - menghitung semua sinyal input dengan bobotnya : z_inm = vm0 + xn vmn - menghitung nilai aktivasi setiap unit hiddensebagai output unit hidden : zm = f(z_inm) - mengirim nilai aktivasi sebagai input untuk unit output.
Algoritma (5) Step 5 : Setiap unit output (Yl, l = 1,…,L) - menghitung semua sinyal inputnya dengan bobotnya : y_inl = wl0 + zm wlm - menghitung nilai aktivasi setiap unit output sebagai output jaringan. yl = f(y_inl)
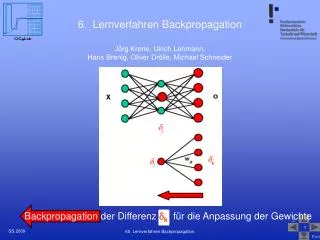
Algoritma (6) 2.b. Perhitungan Komputasi Balik • Komputasi balik dimulai dari lapisan keluaran. Komputasi balik bertujuan untuk menyesuaikan bobot dalam jaringan. • Setiap neuron di lapisan keluaran menghitung selisih target keluaran dan sinyal keluaran. • Setiap neuron di lapisan keluaran menghitung dan menyesuaikan bobot hubungan dari dirinya ke semua neuron di lapisan tersembunyi. • Propagasikan sinyal kesalahan ke lapisan tersembunyi sehingga setiap neuron di lapisan tersembunyi menghitung dan menyesuaikan bobot hubungan dari dirinya ke semua neuron di lapisan masukan (lihat 2)
Fungsi Kesalahan • Algoritma propagasi balik menggunakan prosedur gradient descent atau menuruni lembah permukaan error, untuk meminimisasi suatu fungsi kesalahan. Fungsi kesalahan yang umum dipakai ialah fungsi error kuadratis:
Aturan Pembelajaran (3) 4. Lakukan komputasi balik : a. Komputasi di lapis keluaran: • Setiap neuron di lapisan keluaran diberikan target masukan tertentu. • Hitung sinyal error k untuk setiap neuron k di lapisan ini: • Hitung modifikasi bobot untuk setiap hubungan antara neuron bersangkutan dengan semua neuron di lapisan tersembunyi: • Hitung modifikasi bias untuk setiap neuron di lapisan keluaran:
Aturan Pembelajaran (4) b. Komputasi di lapis tersembunyi: • Hitung sinyal error j untuk setiap neuron j di lapisan tersembunyi: • Hitung modifikasi bobot untuk hubungan antara neuron bersangkutan dengan semua neuron di lapisan masukan: • Hitung modifikasi bias untuk setiap neuron di lapisan tersembunyi:
Aturan Pembelajaran (5) • Ubah bobot dan bias 5. Uji kriteria kesalahan, bila kesalahan lebih besar dari batas yang telah ditetapkan, ulangi langkah 2 sampai 4; bila tidak, pelatihan selesai.
Faktor-faktor dalam Pembelajaran 1. Inisialisasi bobot Bobot awal menentukan apakah jaringan akan mencapai global minima atau local minima kesalahan, dan seberapa cepat jaringan akan konvergen. Inisialisasi acak merupakan cara yang paling sering digunakan dalam inisialisasi bobot. Untuk mempercepat proses pelatihan, suatu modifikasi dari inisialisasi acak diperkenalkan oleh Nguyen dan Widrow. Beberapa faktor yang mempengaruhi keberhasilan algoritma propagasi balik, antara lain:
Faktor-faktor dalam Pembelajaran (2) • Untuk bias dan bobot hubungan antara semua neuron di lapisan tersembunyi dan semua neuron di lapisan keluaran, lakukan inisialisasi acak dengan jangkauan -0,5 dan 0,5. • Untuk bias bobot hubungan antara lapisan tersembunyi dan lapisan masukan, lakukan sebagai berikut: • Hitung = 0.7 (P)1/N di mana adalah faktor skala, P adalah ukuran lapisan tersembunyi dan N adalah ukuran lapisan masukan. Inisialisasi Nguyen-Widrow didefinisikan sebagai:
Faktor-faktor dalam Pembelajaran (3) • Untuk setiap neuron j di lapisan tersembunyi, lakukan sebagai berikut: • Inisialisasi secara acak bobot antara neuron bersangkutan dengan semua neuron di lapisan masukan: wij = bilangan acak antara -0,5 dan 0,5. • Hitung norma wj: • Inisialisasi kembali wij: • Inisialisasi bias: j = bilangan acak antara - dan .
Faktor-faktor dalam Pembelajaran (4) 2. Laju pembelajaran Merupakan parameter jaringan dalam mengendalikan proses penyesuaian bobot. Nilai laju pembelajaran yang optimal bergantung pada kasus yang dihadapi. Laju pembelajaran yang terlalu kecil menyebabkan konvergensi jaringan menjadi lebih lambat, sedang laju pembelajaran yang terlalu besar dapat menyebabkan ketidakstabilan pada jaringan 3. Momentum Momentum digunakan untuk mempercepat pelatihan jaringan. Metode momentum melibatkan penyesuaian bobot ditambah dengan faktor tertentu dari penyesuaian sebelumnya. Penyesuaian dinyatakan sebagai berikut:
Studi Modifikasi Standard Backpropagasi 1. Modifikasi fungsi objektif dan turunan 2. Modifikasi optimsasi algoritma Step Studi : 1. Studi literatur 2. Studi standard backpropagasi a. Uji coba standar backpropagasi pada xor problem b. Evaluasi karakteristik standar backpropagasi 1). Tingkat konvergensi ke global minimum 2). Tingkat akurasi output
Studi Modifikasi Standard Backpropagasi (2) 3. Studi modifikasi standar backpropagasi a. Uji coba modifikasi standar backpropagasi pada XOR problem b. Evaluasi karakteristik modifikasi standar backpropagasi 1). Tingkat konvergensi ke global minimum 2). Tingkat akurasi output 4. Membandingkan standar dan modifikasi backpropagasi a. Tingkat konvergensi ke global minimum b. Tingkat akurasi output 5. Implementasi a. Programing b. Management Database
Backpropagasi • Backpropagasi merupakan algoritma pelatihan untuk memperkecil tingkat error dengan menyesuaikan bobot berdasarkan perbedaan output dan target yang diinginkan. • Proses pelatihan : • Pengambilan input • Penelusuran error • Penyesuaian bobot
Notasi • X : nilai masukan , X = ( X1, ... Xi, ...Xn ) • v : bobot antara bias atau input dengan hidden • Z : nilai aktivasi hidden, Z = ( Z1, ... Xj, ...Xp ) Zj = f (z_in) n z_inj = v0j + xi vij i=1 • w : bobot antara bias atau hidden dengan output • Y : nilai output aktual, Y = ( Y1, ... Yk, ...Ym ) Yk = f (y_in) p y_ink = w0k + xi vij k=1
Tanpa Momentum wjk(t+1) = wjk(t) + wjk wjk = - E(wjk) wjk vij(t+1) = vij(t) + vij vij = - E(vij) vij Dengan Momentum wjk(t+1) = wjk(t) + wjk + wjk(t-1) wjk = - E(wjk) wjk vij(t+1) = vij(t) + vij + vij(t-1) vij = - E(vij) vij Update Bobot
Fungsi Error : Kuadratik E = 0.5 k (tk - Yk)2 • Untuk update bobot antara hidden dan output ; E = E Yk y_ink wjkYk y_inkwjk E = - k (tk - Yk) Yk Yk = f(y_ink) y_ink = wok + zj wjk Yk = f ‘ (y_ink) y_ink = zj y_ink wjk
Fungsi Error : Kuadratik (2) E(wjk) = - k (tk - Yk) f ‘ (y_ink) zj wjk didefinisikan : k = k(tk - yk) (f’(y_in)) E(wjk) = - k Zj wjk W = - (- k Zj )= k Zj
Fungsi Error : Kuadratik(3) • Untuk update bobot antara input dan hidden ; E = E Yk y_inkzj z_inj vijYk y_inkzj z_injvij E = - k (tk - Yk) Yk Yk = f(y_ink) y_ink = wok + zj wjk Yk = f ‘ (y_ink) y_ink = wjk y_ink zj
Fungsi Error : Kuadratik (4) n zj = f ‘ (z_inj) z_inj = v0j + xi vij z_inji=1 z_inj = xi vij E = - k (tk - Yk) f ‘(y_ink) wjk f ‘(z_inj) Xi vij didefinisikan : k = k(tk - yk) (f’(y_in)) E = - k k wjk f ‘(z_inj) Xi vij didefinisikan : j = k k wjk f ‘(z_inj) E = - j Xj vij V = - (- j Xi )= j Xi
Fungsi Error : Cross Entropi E = k (-tk). ln (Yk) - (1 - tk ). ln (1 - Yk) • Untuk update bobot antara hidden dan output ; E = E Yk y_ink wjkYk y_inkwjk E = k -tk + 1 - tk = - k (tk - Yk) Yk Yk 1 - Yk Yk(1-Yk) Yk = f(y_ink) y_ink = wok + zj wjk Yk = f ‘ (y_ink) = Yk (1 - Yk) y_ink = zj y_ink wjk
Fungsi Error : Cross Entropi(2) E = - k (tk - Yk) Yk(1-Yk) zj wjk Yk(1-Yk) = - k (tk - Yk) zj didefinisikan : k = k(tk - yk) E = - k Zj wjk W = - (- k Zj )= k Zj
Fungsi Error : Cross Entropi(3) • Untuk update bobot antara input dan hidden ; E = E Yk y_inkzj z_inj vijYk y_inkzj z_injvij E = k -tk + 1 - tk = - k (tk - Yk) Yk Yk 1 - Yk Yk(1-Yk) Yk = f(y_ink) y_ink = wok + zj wjk Yk = f ‘ (y_ink) = Yk(1-Yk) y_ink = wjk y_ink zj
Fungsi Error : Cross Entropi (4) n zj = f ‘ (z_inj) z_inj = v0j + xi vij z_inji=1 z_inj = xi vij E = - k (tk - Yk) f ‘(y_ink) wjk f ‘(z_inj) Xi vij didefinisikan : k = k(tk - yk) E = - k k wjk f ‘(z_inj) Xi vij didefinisikan : j = k k wjk f ‘(z_inj) E = - j Xj vij V = - (- j Xi )= j Xi
Fungsi Error : Metrik E = k . ln (1 - (tk - Yk)2) • Untuk update bobot antara hidden dan output ; E = E Yk y_ink wjkYk y_inkwjk E = -2 k (tk - Yk) Yk (1 – (tk-Yk)2) Yk = f(y_ink) y_ink = wok + zj wjk Yk = f ‘ (y_ink) = Yk (1 - Yk) y_ink = zj y_ink wjk
Fungsi Error : Metrik(2) E = -2 k (tk - Yk) Yk(1-Yk) zj wjk (1-(tk-Yk)2) = - k (tk - Yk) zj didefinisikan : k = -2 k (tk - yk) Yk(1-Yk) (1-(tk-Yk)2) E = - k Zj wjk W = - (- k Zj )= k Zj
Fungsi Error : Metrik(3) • Untuk update bobot antara input dan hidden ; E = E Yk y_inkzj z_inj vijYk y_inkzj z_injvij E = -2 k (tk - Yk) Yk (1(tk – Yk)2) Yk = f(y_ink) y_ink = wok + zj wjk Yk = f ‘ (y_ink) = Yk(1-Yk) y_ink = wjk y_ink zj
Fungsi Error : Metrik(4) n zj = f ‘ (z_inj) z_inj = v0j + xi vij z_inji=1 z_inj = xi vij E = -2 k (tk - Yk) f ‘(y_ink) wjk f ‘(z_inj) Xi vij (1-(tk-Yk)2) didefinisikan : j = k k wjk f ‘(z_inj) E = - j Xj vij V = - (- j Xi )= j Xi
Algoritma Step 0 : Inisialisasi Bobot • Random • Nguyen-Widrom Step 1 : Selama kondisi stopping FALSE, lakukan Step 2-9 Step 2 : Untuk setiap pasangan pelatihan, lakukan Step 3-8 (Proses Feedforward) : Step 3 : Setiap unit input (Xi, i = 1,…,n) - menerima input xi - mengirimkannya ke semua unit layer diatasnya (Hidden layer).
Algoritma (2) Step 4 : Setiap unit hidden (Zj, j = 1,…,p) - menghitung semua sinyal input dengan bobotnya : z_inj = voj + xi vij - menghitung nilai aktivasi setiap unit hidden sebagai output unit hidden : zj = f(z_inj) - mengirim nilai aktivasi sebagai input untuk unit output.
Algoritma (3) Step 5 : Setiap unit output (Yk, k = 1,…,m) - menghitung semua sinyal inputnya dengan bobotnya : y_ink = wok + zj wjk - menghitung nilai aktivasi setiap unit output sebagai output jaringan. yk = f(y_ink)
Algoritma (4) (Backpropagation of error) : Step 6 : Setiap unit output (Yk, k = 1,…,m) : - menerima pola target yang bersesuaian dengan pola input - menghitung informasi error : k = (tk - yk) f’(y_ink) - menghitung besarnya koreksi bobot unit output : wjk = E(wjkj)/wjk = k zj - menghitung besarnya koreksi bias output : w0k = k - mengirimkan k ke unit-unit yang ada pada layer di bawahnya.
Algoritma(5) Step 7 : Setiap unit hidden (Zj, j = 1,…,p) : - menghitung semua koreksi error : _inj = k wjk - menghitung nilai aktivasi koreksi error : j = _inj f’(z_inj) - menghitung koreksi bobot unit hidden : vij = j xi - menghitung koreksi error bias unit hidden : v0j = j
Algoritma(6) Step 8 : Setiap unit output (Yk, k = 1,…,m) : - meng-update bobot dan biasnya (j = 0,…,p) : wjk(baru) = wjk(lama) + wjk w0k(baru) = w0k(lama) + w0k Setiap unit hidden (Zj, j = 1,…,p) - meng-update bobot dan biasnya (i = 0,…,n) : vij(baru) = vij(lama) + vij v0j(baru) = v0j(lama) + v0j Step 9 : Kondisi stopping ( Toleransi error )
Metode Inisialisasi Nguyen Widrow Menentukan faktor skala : = 0.7 (p) 1/n dengan : faktor skala n : jumlah unit input p : jumlah unit hidden Algoritma : Untuk setiap unit hidden (j=1, ... , p) : • Inisialisasi bobot secara random vij = bilangan acak antara -0.5 sampai 0.5 p • Hitung : vj = { (vij)2} i=1 • Update bobot vij = vij vj • Set bias v0j : bilangan acak antara - sampai