Download
1 / 1
10 likes | 190 Views
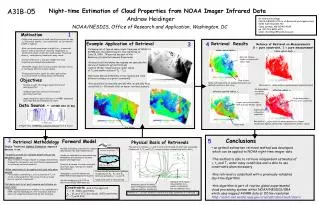
Lowering the Cirrus Cloud detection threshold will capture much thinner cirrus (optical depth of 0.08 in this example). 1.38um Cloud Model Reflectance. B26 Cloud test threshold in V3.0.0 (current). New B26 Cloud test threshold under evaluation. Optical depth detectable

E N D
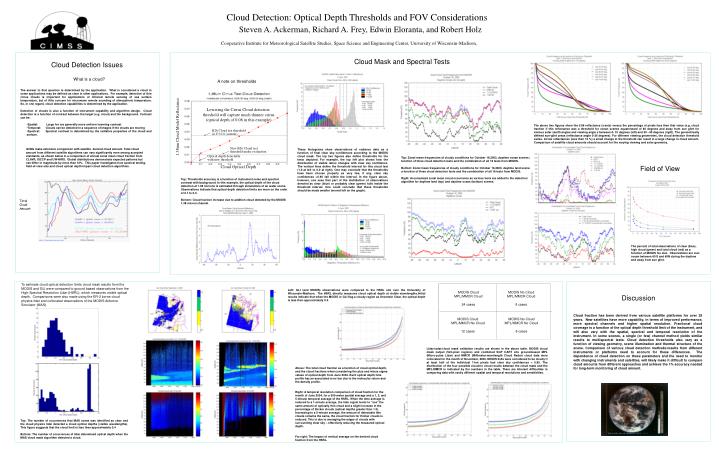
Lowering the Cirrus Cloud detection threshold will capture much thinner cirrus (optical depth of 0.08 in this example) 1.38um Cloud Model Reflectance B26 Cloud test threshold in V3.0.0 (current) New B26 Cloud test threshold under evaluation Optical depth detectable with new threshold Cloud Optical Depth Cloud Detection: Optical Depth Thresholds and FOV Considerations Steven A. Ackerman, Richard A. Frey, Edwin Eloranta, and Robert Holz Cooperative Institute for Meteorological Satellite Studies, Space Science and Engineering Center, University of Wisconsin-Madison, Cloud Mask and Spectral Tests Cloud Detection Issues What is a cloud? A note on thresholds • The answer to that question is determined by the application. What is considered a cloud in some applications may be defined as clear in other applications. For example, detection of thin cirrus clouds is important for applications of infrared remote sensing of sea surface temperature, but of little concern for microwave remote sounding of atmospheric temperature. So, in one regard, cloud detection capabilities is determined by the application. • Detection of clouds is also a function of instrument capability and algorithm design. Cloud detection is a function of contrast between the target (e.g. cloud) and the background. Contrast can be: • Spatial: Large fov are generally more uniform lowering contrast • Temporal: Clouds can be detected in a sequence of images if the clouds are moving • Spectral: Spectral contrast is determined by the radiative properties of the cloud and surface. The above two figures show the 0.86 reflectance (x-axis) versus the percentage of pixels less then that value (e.g. cloud fraction if this reflectance was a threshold for ocean scenes equatorward of 60 degrees and away from sun glint for various solar zenith angles and viewing angle s between 0- 10 degrees (left) and 30 –40 degrees (right). The geometrically defined sun-glint areas (reflectance angle 0-36 degrees). For different viewing geometries, the cloud detection threshold varies. At low reflectances (less then 10 %) a small change in the threshold can result in a large change in cloud amount. Comparison of satellite cloud amounts should account for the varying viewing and solar geometry. GCMs make extensive comparison with satellite derived cloud amount. Total cloud amount from different satellite algorithms can vary significantly even among accepted standards, as shown below in a comparison of annual zonal mean cloud fraction from CLAVR, ISCCP and UW-HIRS. Global distributions demonstrate expected patterns but can differ in magnitude by more then 10%. This paper investigates how spectral testing, field-of-view size and cloud optical depth impact cloud detection algorithms. These histograms show observations of radiance data as a function of final clear sky confidences according to the MODIS cloud mask. The top two figures also define thresholds for the tests depicted. For example, the top left plot shows how the distribution of visible ratios changes with clear sky confidence. The vertical lines define the threshold interval for this cloud test (1.0 at left to 0.0 at right). One may conclude that the thresholds have been chosen properly as very few, if any, clear sky confidences >0.95 fall within the interval. In the figure above, however, one sees that part of the distribution of observations denoted as clear (blue) or probably clear (green) falls inside the threshold interval. One could conclude that these thresholds should be made smaller (moved left on the graph). Top: Zonal mean frequencies of cloudy conditions for October 16,2003, daytime ocean scenes as a function of three cloud detection tests and the combination of all 16 tests from MODIS. Bottom: Zonal mean frequencies of cloudy conditions for October 16,2003, daytime land scenes as a function of three cloud detection tests and the combination of all 16 tests from MODIS. Right: Accumulated zonal mean cloud occurrence as various tests are added to the detection algorithm for daytime land (top) and daytime ocean (bottom) scenes. snow Field of View Top: Thresholds accuracy is a function of instrument noise and spectral contrast with background. In this example, the optical depth of the cloud detection at 1.38 microns is estimated through simulations of an water scene. Observations indicate that optical depth detection limits are more on the order of 0.1 to 0.3. Bottom: Cloud fraction increase due to addition cloud detected by the MODIS 1.38 micron channel. Total Cloud Amount The percent of total observations of clear (blue), high cloud (green) and total cloud (red) as a function of MODIS fov size. Observations are over ocean between 60 S and 60N during the daytime and away from sun glint. To estimate cloud optical detection limits cloud mask results from the MODIS and GLI were compared to ground based observations from the High-Spectral Resolution Lidar (HSRL), which measures visible optical depth. Comparisons were also made using the ER-2 borne cloud physics lidar and collocated observations of the MODIS Airborne Simulator (MAS) Left: GLI (and MODIS) observations were compared to the HSRL site over the University of Wisconsin-Madison. The HSRL directly measures cloud optical depth at visible wavelengths.Initial results indicate that when the MODIS or GLI flag a cloudy region as Uncertain Clear, the optical depth is less then approximately 0.3. MODIS Cloud MPL/MMCR Cloud 24 cases MODIS No Cloud MPL/MMCR Cloud 9 cases Discussion Cloud fraction has been derived from various satellite platforms for over 25 years. New satellites have more capability, in terms of improved performance, more spectral channels and higher spatial resolution. Fractional cloud coverage is a function of the optical depth threshold limit of the instrument, and will also vary with the spatial, spectral and temporal resolution of the instrument. In some scenes, a single (or few) channel method yields similar results to mutlispectral tests. Cloud detection thresholds also vary as a function of viewing geometry, scene illumination and thermal structure of the scene. Comparison of various cloud detection methods/results from different instruments or platforms need to account for these differences. The dependence of cloud detection on these parameters and the need to monitor with changing instruments and satellites, will likely make it difficult to compare cloud amounts from different approaches and achieve the 1% accuracy needed for long-term monitoring of cloud amount. MODIS Cloud MPL/MMCR No Cloud 12 cases MODIS No Cloud MPL/MMCR No Cloud 8 cases Lidar/radar/cloud mask validation results are shown in the above table. MODIS cloud mask output (5x5-pixel regions) and combined SGP CART site ground-based MPL (Micro-pulse Lidar) and MMCR (Millimeter-wavelength Cloud Radar) cloud data were collocated for the month of November, 2000. MODIS 5x5s were considered to be cloudy if at least half of the individual 1-km pixels had clear sky confidences < 0.95. The distribution of the four possible cloud/no cloud results between the cloud mask and the MPL/MMCR is indicated by the numbers in the table. There are inherent difficulties in comparing data with vastly different spatial and temporal resolutions and sensitivities. snow Above: The total cloud fraction as a function of cloud optical depth, and the cloud fractions when considering the plus and minus sigma values of optical depth from June 2004. Each optical depth time profile has an associated error bar due to the molecular return and the density profile. Right: A temporal resolution comparison of cloud fraction for the month of June 2004, for a 300-meter spatial average and a 1, 3, and 5-minute temporal average of the HSRL. When the time average is reduced to a 1-minute average, the lidar signal tends to “see” the same amount of optically thin cloud and a slight increase in the percentage of thicker clouds (optical depths greater than 1.0). Increasing to a 5-minute average, the amount of detectable thin clouds remains the same, the cloud fraction for thicker clouds is reduced. This is due to averaging the edges of clouds with surrounding clear sky – effectively reducing the measured optical depth. Far right: The impact of vertical average on the derived cloud fraction from the HSRL. Top: The number of occurrences that MAS scene was identified as clear and the cloud physics lidar detected a cloud optical depths (visible wavelengths). This figure suggests that the cloud limit is less then approximately 0.4 Bottom: The number of occurrences of lidar determined optical depth when the MAS cloud mask algorithm detected a cloud.