Download
1 / 28
280 likes | 469 Views
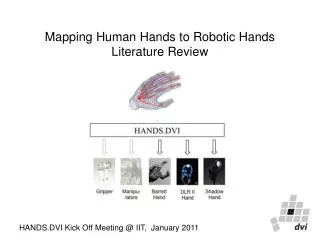
HANDS.DVI A DeVice -Independent programming and control framework for robotic HANDS. Università di Siena , Università di Pisa and Istituto Italiano di Tecnologia HANDS.DVI Kick Off Meeting @ IIT, January 2011 . ECHORD.

E N D
HANDS.DVI A DeVice-Independent programming and control framework for robotic HANDS Università di Siena , Università di Pisa and IstitutoItaliano di Tecnologia HANDS.DVI Kick Off Meeting @ IIT, January 2011
ECHORD ECHORD (European Clearing House for Open Robotics Development) is a EU funded project aiming to strengthen the cooperation between scientific research and industry in robotics. However, finding common ground between manufacturers and the research community, especially when it comes to defining the future direction of robotics research, has proven difficult in the past. ECHORD will act as a "clearing house" to streamline successful know-how transfers. ECHORD is coordinated by Technical University of Munich. The experiments are the ECHORD projects.
The problem Because of their intrinsic complexity, there is not a standard approach to the control of grasping and manipulation tasks. Borrowing the terminology of software engineering, there is a need for middleware solutions for manipulation and grasping tasks to seamlessly integrate robotic hands in flexible cells.
The project’s idea The abstraction layer is based on sensorimotor synergies. Synergies with the The Hand Embodied EU project.
Sensorimotor synergies Recent results on the organization of the human hand in grasping and manipulation are the inspiration for this project proposal: these results have demonstrated that, notwithstanding the complexity of the human hand, a few variables are able to account for most of the variance in the patterns of human hands configuration and movement.
The main points The paradigmatic hand: ``A trade–off between the complexity of the human hand model accounting for the synergistic organization of the sensorimotor system and the simplicity of the models of robotic hands available on the market. ‘’ Postural synergies ``The paradigmatic hand will be developed to define a basis of synergies that will allow to design simplified strategies for the control of grasping forces. Here, the number and the structures of the force synergies will be defined.’’ Projecting synergies to the robotic hands with dissimilar kinematics ``Theoretical tools to design a suitable mapping function of the control action (decomposed in its elemental action, synergies) from the paradigmatic hand domain onto the articulated hand co-domain. The definition of this mapping is the core of HANDS.DVI. Experiments ``The experiment consists of 3 robotic hands and an instrumented object with force sensors.’’
Simplifying assumptions: objects With reference to the taxonomy [Curkosky], the different postures proposed in HANDS.DVI for the experiments will be - a power/prehensile/prismatic/heavy wrap grasp, also named cylindrical, characterized by a large diameter of the cylinder involved; - a power/prehensile/circular grasp, characterized by a spherical configuration; - a precision/prismatic grasp, characterized by the opposition of the thumb and the other fingers. Ranging from heavy wrap power grasps to precision grasps, the above postures cut across the whole grasp choice space and, therefore, can be considered representative of the most common grasps a robotic hand would be asked to realize in hyper-flexible cells.
Simplifying assumptions: contacts The force sensors are fixed to the object that will be referred to as the instrumented object. The instrumented object can change its shape but has given and fixed contact points. This is not a limitation since the focus of HANDS.DVI is on the control of contact force interaction and not on the approaching phase where the choice of contact points is important For a given shape of the object we will a–priori choose the optimal position of contact points on the object surface.
Three Tasks (UNISI,UNIPI,IIT) task SYN HANDS.DVI task DVI task EXP Cooperative Manipu-lators Industrial Gripper BarrettHand ShadowHand DLR II Hand
Mar ‘11 Jul ‘11 Jul ‘11 Jul ’11 Jan’12 May’11 Mar’12 ’
The paradigmatic hand Kinematic model of the hand @ UNISI (20 DoFs)
Matlab toolbox for grasp analysis with synergies Hand kinematic structure (via DH parameters) Grasped object: search the contact points Hand reference configuration Grasp Analysis Synergy matrix definition Grasp optimization tools
Task space mapping with ellipsoids Middleware Real hand synergies synergies ? In the task frame. Object-oriented. - compute the ellipsoids (force/manipulation) associated to the synergies in the paradigmatic space - assign those ellipsoid to the same object but with the real hand - with an inversion problem compute the synergy mapping This is the synergy mapping for a given object and a given set of contacts.
Literature review Eingengraps Mapping approaches (virtual finger)