Download
1 / 32
320 likes | 442 Views
Beyond bags of features: Part-based models. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba. visual codeword with displacement vectors. Implicit shape models. Visual codebook is used to index votes for object position.

E N D
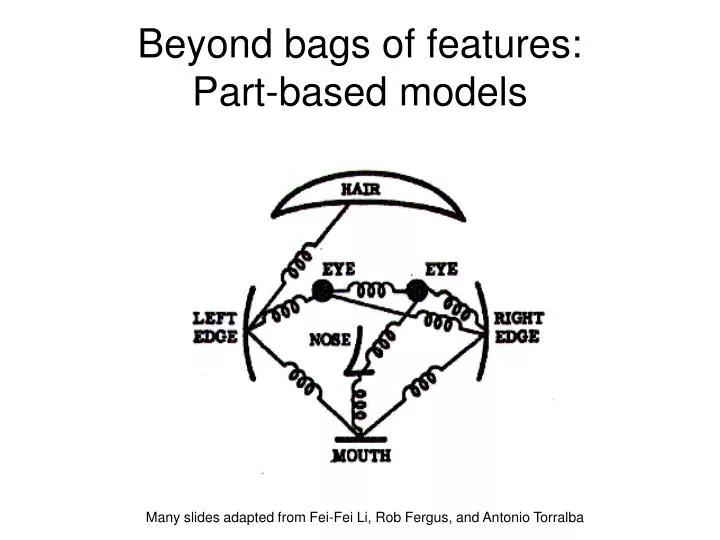
Beyond bags of features:Part-based models Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
visual codeword withdisplacement vectors Implicit shape models • Visual codebook is used to index votes for object position training image annotated with object localization info B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
Implicit shape models • Visual codebook is used to index votes for object position test image B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
Implicit shape models: Training • Build codebook of patches around extracted interest points using clustering
Implicit shape models: Training • Build codebook of patches around extracted interest points using clustering • Map the patch around each interest point to closest codebook entry
Implicit shape models: Training • Build codebook of patches around extracted interest points using clustering • Map the patch around each interest point to closest codebook entry • For each codebook entry, store all positions it was found, relative to object center
Implicit shape models: Testing • Given test image, extract patches, match to codebook entry • Cast votes for possible positions of object center • Search for maxima in voting space • Extract weighted segmentation mask based on stored masks for the codebook occurrences
Original image Example: Results on Cows Source: B. Leibe
Interest points Example: Results on Cows Source: B. Leibe
Example: Results on Cows Matched patches Source: B. Leibe
Example: Results on Cows Probabilistic votes Source: B. Leibe
Example: Results on Cows Hypothesis 1 Source: B. Leibe
Example: Results on Cows Hypothesis 2 Source: B. Leibe
Example: Results on Cows Hypothesis 3 Source: B. Leibe
Additional examples B. Leibe, A. Leonardis, and B. Schiele, Robust Object Detection with Interleaved Categorization and Segmentation, IJCV 77 (1-3), pp. 259-289, 2008.
Generative part-based models R. Fergus, P. Perona and A. Zisserman, Object Class Recognition by Unsupervised Scale-Invariant Learning, CVPR 2003
What is a generative model? • Model the probability of an image given a class vs.
Making a decision • Maximum a posteriori (MAP) decision: assign the image to the class that gets the highest posterior probability P(class | image)
Making a decision • Maximum a posteriori (MAP) decision: assign the image to the class that gets the highest posterior probability P(class | image) • Bayes rule:
posterior likelihood prior Generative vs. discriminative models • Generative methods: model likelihood and prior • Discriminative methods: model posterior
Generative vs. discriminative models Generative Discriminative Posterior probabilities Class densities
The Naïve Bayes model • Generative model for a bag of features • Assume that each feature fi is conditionally independent given the class c:
Generative part-based model Partdescriptors Partlocations Candidate parts
Generative part-based model h: assignment of features to parts Part 1 Part 3 Part 2
Generative part-based model h: assignment of features to parts Part 1 Part 3 Part 2
Generative part-based model Distribution over patchdescriptors High-dimensional appearance space
Generative part-based model Distribution over jointpart positions 2D image space
Results: Faces Faceshapemodel Patchappearancemodel Recognitionresults
Pictorial structures • Set of parts (oriented rectangles) connected by edges • Recognition problem: find the most probable part layout l1, …, ln in the image P. Felzenszwalb and D. Huttenlocher, Pictorial Structures for Object Recognition, IJCV 61(1), 2005
Pictorial structures • MAP formulation: maximize posterior • Energy-based formulation: minimize minus the log of probability: Appearance Geometry Deformation cost Matching cost
Pictorial structures: Complexity • Suppose there are n parts, and each has h possible positions in the image • What is the complexity of finding the optimal layout? • Brute force search: O(hn) • Tree-structured model: O(h2n) • Deformation cost is quadratic: O(hn)