Download
1 / 1
10 likes | 115 Views
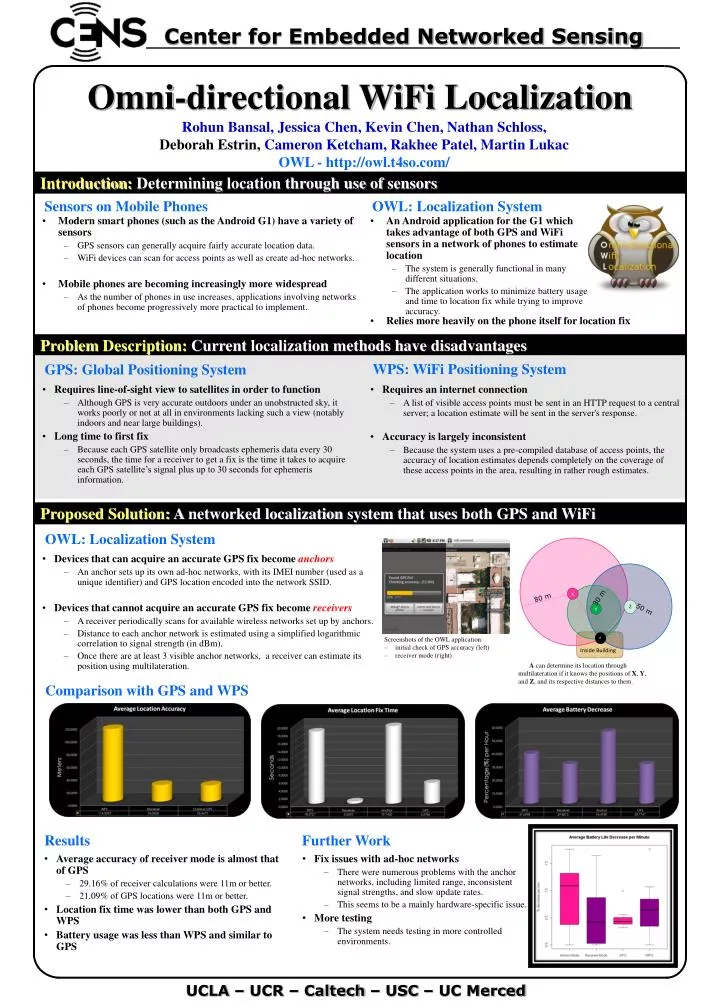
Center for Embedded Networked Sensing. Omni-directional WiFi Localization. Rohun Bansal, Jessica Chen, Kevin Chen, Nathan Schloss, Deborah Estrin, Cameron Ketcham, Rakhee Patel, Martin Lukac OWL - http://owl.t4so.com/. Introduction: Determining location through use of sensors.

E N D
Center for Embedded Networked Sensing Omni-directional WiFi Localization Rohun Bansal, Jessica Chen, Kevin Chen, Nathan Schloss, Deborah Estrin,Cameron Ketcham, Rakhee Patel, Martin Lukac OWL - http://owl.t4so.com/ Introduction: Determining location through use of sensors Sensors on Mobile Phones OWL: Localization System • Modern smart phones (such as the Android G1) have a variety of sensors • GPS sensors can generally acquire fairly accurate location data. • WiFi devices can scan for access points as well as create ad-hoc networks. • Mobile phones are becoming increasingly more widespread • As the number of phones in use increases, applications involving networks of phones become progressively more practical to implement. • An Android application for the G1 which takes advantage of both GPS and WiFi sensors in a network of phones to estimate location • The system is generally functional in many different situations. • The application works to minimize battery usage and time to location fix while trying to improve accuracy. • Relies more heavily on the phone itself for location fix Problem Description:Current localization methods have disadvantages WPS: WiFi Positioning System GPS: Global Positioning System • Requires line-of-sight view to satellites in order to function • Although GPS is very accurate outdoors under an unobstructed sky, it works poorly or not at all in environments lacking such a view (notably indoors and near large buildings). • Long time to first fix • Because each GPS satellite only broadcasts ephemeris data every 30 seconds, the time for a receiver to get a fix is the time it takes to acquire each GPS satellite’s signal plus up to 30 seconds for ephemeris information. • Requires an internet connection • A list of visible access points must be sent in an HTTP request to a central server; a location estimate will be sent in the server's response. • Accuracy is largely inconsistent • Because the system uses a pre-compiled database of access points, the accuracy of location estimates depends completely on the coverage of these access points in the area, resulting in rather rough estimates. Proposed Solution:A networked localization system that uses both GPS and WiFi OWL: Localization System ` • Devices that can acquire an accurate GPS fix become anchors • An anchor sets up its own ad-hoc networks, with its IMEI number (used as a unique identifier) and GPS location encoded into the network SSID. • Devices that cannot acquire an accurate GPS fix become receivers • A receiver periodically scans for available wireless networks set up by anchors. • Distance to each anchor network is estimated using a simplified logarithmic correlation to signal strength (in dBm). • Once there are at least 3 visible anchor networks, a receiver can estimate its position using multilateration. X 80 m 30 m Z Y 50 m Inside Building A • Screenshots of the OWL application: • initial check of GPS accuracy (left) • receiver mode (right) A can determine its location through multilateration if it knows the positions of X, Y, and Z, and its respective distances to them. Comparison with GPS and WPS Results Further Work • Average accuracy of receiver mode is almost that of GPS • 29.16% of receiver calculations were 11m or better. • 21.09% of GPS locations were 11m or better. • Location fix time was lower than both GPS and WPS • Battery usage was less than WPS and similar to GPS • Fix issues with ad-hoc networks • There were numerous problems with the anchor networks, including limited range, inconsistent signal strengths, and slow update rates. • This seems to be a mainly hardware-specific issue. • More testing • The system needs testing in more controlled environments. UCLA – UCR – Caltech – USC – UC Merced