Download
1 / 1
30 likes | 200 Views
Kalman filter v1. Kalman filter v2. Multiple targets. Target controller. Sensor Interface. Target 1. Target 2. Target 3. Target 4. Target 5. SCORES. Interface. Interface. Interface. Interface. Interface. Switch 5. Switch 1. Switch 2. Switch 3. Switch 4. Interface. Interface.

E N D
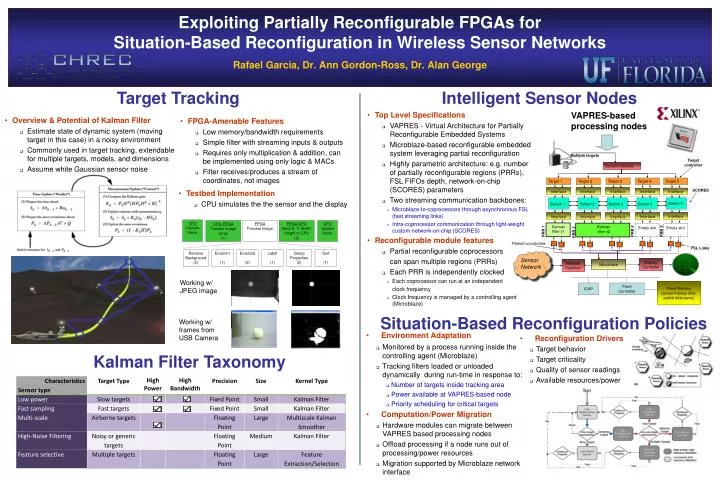
Kalman filter v1 Kalman filter v2 Multiple targets Target controller Sensor Interface Target 1 Target 2 Target 3 Target 4 Target 5 SCORES Interface Interface Interface Interface Interface Switch 5 Switch 1 Switch 2 Switch 3 Switch 4 Interface Interface Interface Interface Interface Empty slot Empty slot Empty slot Empty slot Empty slot PRR 4 PRR 1 PRR 5 PRR 3 PRR 2 Filtered coordinates FSL Links Sensor Network Display Controller Microblaze Network Interface Flash Memory (stores Kalman filter partial bitstreams) ICAP Flash Controller CPU Capture frame CPU-FPGA Transfer image array (1) FPGA Process image FPGA-CPU Send X, Y, Width, Height to CPU (2) CPU Update frame Remove Background (2) Erosion1 (1) Erosion2 (2) Label (1) Group Properties (2) Sort (1) Exploiting Partially Reconfigurable FPGAs for Situation-Based Reconfiguration in Wireless Sensor NetworksRafael Garcia, Dr. Ann Gordon-Ross, Dr. Alan George • Overview & Potential of Kalman Filter • Estimate state of dynamic system (moving target in this case) in a noisy environment • Commonly used in target tracking, extendable for multiple targets, models, and dimensions • Assume white Gaussian sensor noise Target Tracking Intelligent Sensor Nodes • Top Level Specifications • VAPRES - Virtual Architecture for Partially Reconfigurable Embedded Systems • Microblaze-based reconfigurable embedded system leveraging partial reconfiguration • Highly parametric architecture: e.g. number of partially reconfigurable regions (PRRs), FSL FIFOs depth, network-on-chip (SCORES) parameters • Two streaming communication backbones: • Microblaze-to-coprocessors through asynchronous FSL (fast streaming links) • Intra-coprocessor communication through light-weight custom network-on-chip (SCORES) • Reconfigurable module features • Partial reconfigurable coprocessors can span multiple regions (PRRs) • Each PRR is independently clocked • Each coprocessor can run at an independent • clock frequency • Clock frequency is managed by a controlling agent (Microblaze) VAPRES-based processing nodes • FPGA-Amenable Features • Low memory/bandwidth requirements • Simple filter with streaming inputs & outputs • Requires only multiplication & addition, can be implemented using only logic & MACs • Filter receives/produces a stream of coordinates, not images • Testbed Implementation • CPU simulates the the sensor and the display Working w/ JPEG image Situation-Based Reconfiguration Policies Working w/ frames from USB Camera • Environment Adaptation • Monitored by a process running inside the controlling agent (Microblaze) • Tracking filters loaded or unloaded dynamically during run-time in response to: • Number of targets inside tracking area • Power available at VAPRES-based node • Priority scheduling for critical targets • Computation/Power Migration • Hardware modules can migrate between VAPRES based processing nodes • Offload processing if a node runs out of processing/power resources • Migration supported by Microblaze network interface • Reconfiguration Drivers • Target behavior • Target criticality • Quality of sensor readings • Available resources/power Kalman Filter Taxonomy