Download
1 / 16
170 likes | 310 Views
Pseudoinverse Learning Algorithm for Feedforward Neural Networks. Supervisor: Professor Michael Lyu. Guo, Ping. Markers: Professor L.W. Chan and I. King. Department of Computer Science & Engineering, The Chinese University of Hong Kong, Hong Kong. September 21, 2014. Introduction.

E N D
Pseudoinverse Learning Algorithm for Feedforward Neural Networks Supervisor: Professor Michael Lyu Guo, Ping Markers: Professor L.W. Chan and I. King Department of Computer Science & Engineering, The Chinese University of Hong Kong, Hong Kong September 21, 2014
Introduction • Feedforward Neural Network • Widely used for pattern classification and universal approximation • Supervised learning task • Back propagation algorithm used to train the neural network • Poor convergence rate and local minima problem • Learning factors problem ( learning rate, momentum constant) • Time-consuming computation for some task by BP • Pseudoinverse Learning Algorithm • Batch-way learning • Matrix inner product and pseudoinverse operation
Network Structure (a) • Multilayer Neural Network (Mathematics Expression) • Input matrix: , output matrix: • Connect weight matrix • Nonlinear activate function • Network Mapping Function (with two hidden layers)
Network Structure (b) • Multilayer Neural Network (Mathematics Expression) • Denote l-th layer output • Network output: • To find the weigh matrices based on training data set
Pseudoinverse Solution (a) • Existence of the Solution • Linear Algebra Theorem: • Best Approximation Solution (Theorem) • The best solution for is • Pseudoinverse solution
Pseudoinverse Solution (b) • Minimize error function • Learning Task • If Y is full rank, above equation will be held • Learning task becomes to raise the rank of Y.
Pseudoinverse Learning Algorithm • Let • Compute • Yes, go to 6. No, next step • Let feed this as input to next layer, compute • Compute and go to step 3 • Let • Stop training. Real network output is
Add and Delete Sample (b) Computation efficiently Griville’s Theorem Add a sample: From (k-1)-th to calculate k-th pseudoinverse matrix
Add and Delete Sample (b) Computation efficiently Delete a sample: Let Bordering algorithm: Delete a sample: From (k+1)-th to calculate k-th pseudoinverse matrix
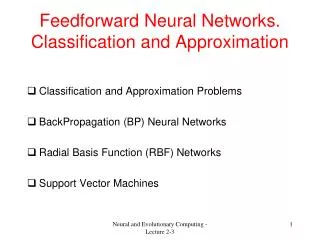
Numerical Examples (a) Function Mapping (1) Sin(x) (smooth function) (2) Nonlinear function: 8-D input, 3-D output (3) Smooth function (4) Piecewise smooth function
Numerical Examples (b) Function Mapping Table 1 Generalization ability test results. 20 training samples, 100 test samples Table 2 Generalization ability test results. 5 or 50 training samples, 100 test samples
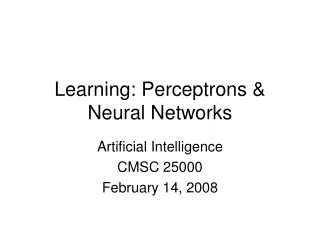
o o o o o * o * o 1.5 o o o o o * 1 o o o o * o o o o o o o o o o * * o o o o o o * o * o o o o o o o o * o o o o o o o o * o o o * * o o o 1 o o o o 0.5 o o o * o o o o o o o o o o * o * o o o o o * o o o o o o * * o o o o o o * o o Output o 0.5 o o o Output o o * * 0 o o o o o o o o * o o o o o * o * o o o o o o o o * o * o o o o o o o o o o o o o o o o o o * o o o o * o 0 o * o o o o * o o -0.5 o o o o o o o * o * o o o o o o o * o o o * o o o o o o o o o o * o * o o * o -0.5 o o o o * o o o o o * o o o o o o o o * -1 0 0.5 1 1.5 2 2.5 3 0 1 2 3 4 5 6 Input Input o o o o o o o o o o o 1.5 * * o o o o o o 1.5 o o o o o o o * o o o o o o o o o o o * o o o o o o o o o o o o o * o 1 o 1 o o o o * o o o o o o o o o * o o o o o o o o o o o o o o o * o 0.5 o o o o o 0.5 o o o o * o o o o o o o o o o * o o o o o o Output * * 0 o Output * * * 0 o o o * o o o o o o o o o o * o o o o o o o o o * -0.5 -0.5 o o o o o o o * o o o o o * o o o o o o o o * -1 o -1 o o o o o o o o o o o o o * o o o o o o o o o o o o o o * o o o o o o o o o o o -1.5 o o * o o -1.5 o o o o o * o o o o o 0 1 2 3 4 5 6 0 1 2 3 4 5 6 Input Input Numerical Examples (c) Function Mapping “*”— training data, “o”– test data Example 1 Example 3 Example 4, 20 training samples Example 4, 5 training samples
* 1 * * * o * * o o * * 0.8 o * * o failures o o o * * 0.6 * o * * * * * * of * 0.4 o o * * * o * * o * Number * o * 0.2 * * * * * * * * o * 0 o 0 0.2 0.4 0.6 0.8 1 Execution Time Numerical Examples (d) Real world data set Software reliability growth model -- Sys1 data Total 54 samples, partitioned data into training samples (37) and test samples (17). “*”— training data, “o”– test data
+ + + + 1 + + + o + 0.8 failures o 0.6 + of o 0.4 o o o o o o o o Number o 0.2 o + + o o + + + + + o 0 0 0.2 0.4 0.6 0.8 1 Execution Time Numerical Examples (e) Real world data set Software reliability growth model -- Sys1 data Stacked generalization test, level-0 output is the level-1 input. “o”— level-0 output, “+”– level-1 output. Generalization is poor
Discussion • Local minima can be avoided by certain initialization. • No user selected parameter, “learning factor” problem is avoided. • Differentiable activate function is not necessary • Batch way learning, speed is fast • Provide an effective method to investigate some computation-intensive techniques • Further work: to find the techniques for generalization when noise data presented.
Thanks End of Presentation Q & A September 21, 2014