Download
1 / 30
300 likes | 394 Views
Legged Locomotion Planning. Kang Zhao B659 Intelligent Robotics Spring 2013. Planning Biped Navigation Strategies in Complex Environments Joel Chestnutt , James Kuffner , Koichi Nishiwaki , Satoshi Kagami. Global terrain map M Goal Primitive set {Trans} Search algorithm.

E N D
Legged Locomotion Planning Kang Zhao B659 Intelligent Robotics Spring 2013
Planning Biped Navigation Strategies in Complex Environments • Joel Chestnutt, James Kuffner, Koichi Nishiwaki, Satoshi Kagami
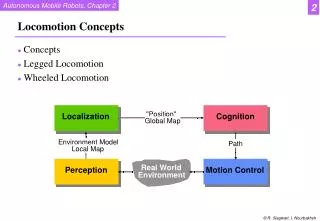
Global terrain map M • Goal • Primitive set {Trans} • Search algorithm
Algorithm - Biped Robot Model • State: • θ: position and orientation relative to {U} • One-step motion destination
Algorithm- State transitions • Footstep transition 1 … 4 2 3 0 5 6 Branching factor 7 A 16-transitions set
Algorithm- Environment • Terrain map
Algorithm- State Evaluation Location metric to evaluate a location’s cost Slope angle Roughness Stability Largest bump Safety
The slope angle of the surface at the candidate location. Perfectly horizontal surfaces are desired. The slope angle is computed by fitting a plane h(x, y) to the cells in the location. Slope angle Roughness Stability Largest bump It’s purpose is to take into account the possible inaccuracy of foot positioning. This can be computed using the roughness and largest bump metrics, using the cells around the foot location Safety
Algorithm- State Evaluation Step metric to evaluate cost of taking a step • Penalty for height change • Collision check Cost of transition
Algorithm- State Evaluation The heuristic functionestimates the cost to go from to a goal state Heuristic metric to evaluate remaining cost Euclidean distance Relative angle Height difference Its value is independent of the current search tree; it depends only on and the goal
Best First Search • It exploits state description to estimate how “good” each search node is • An evaluation function maps each node of the search tree to a real number • Greedy BFS
Searching the State Space A schematic view Search tree
Searching the State Space A schematic view Search tree
Searching the State Space A schematic view Search tree
Searching the State Space A schematic view Search tree
Searching the State Space A schematic view Search tree
Searching the State Space A schematic view Search tree
Results • Cluttered terrain
Results • Multi-level terrain
Results • Uneven ground with obstacles
Comparisons • Distance to goal • Transitions and obstacle effects • Metric weights
BFS A 26-transitions set A 40-transitions set
Performance comparison of A* and BFS for increasing numbers of stairs along the path
Online Experiments Stereo vision system Walking area map Planner Footstep sequence Trajectory generator
Following work • A tired planning Strategy for biped navigation, 2004 • Biped navigation in rough environments using on-board sensing, 2009
Multi-Step Motion Planning for Free-climbing Robots • Tim Bretl, Sanjay Lall, Jean-Claude Latombe, Stephen Rock